

Automazione e controllo industriale
Al giorno d'oggi sistemi di automazione industriale sono diventati popolari in molti settori e svolgono un ruolo cruciale nel controllo di diverse operazioni relative ai processi. Grazie all'implementazione di un'ampia varietà di reti industriali con la loro distribuzione geografica sulla fabbrica o sull'industria, la capacità di trasferimento e controllo dei dati di base è diventata più sofisticata e facile, dal controllo di basso livello a quello di alto livello. Queste reti industriali vengono instradate attraverso vari bus di campo che utilizzano vari standard di comunicazione come protocollo CAN, Profibus, Modbus, Device net, ecc. Vediamo quindi come funziona la comunicazione CAN per automatizzare le industrie e altri sistemi basati sull'automazione .
Introduzione all'automazione e al controllo industriale
La figura seguente mostra l'architettura di automazione e controllo industriale in cui vengono eseguiti tre livelli di controllo per automatizzare l'intero sistema. Questi tre livelli sono controllo e automazione, controllo di processo e controllo di ordine superiore. Il livello di controllo e automazione è costituito da vari dispositivi di campo come sensori e attuatori per monitorare e controllare le variabili di processo.

Architettura di automazione industriale
Process Control Level è un controller centrale responsabile del controllo e della manutenzione di diversi dispositivi di controllo come Controllori logici programmabili (PLC) , e anche le interfacce grafiche utente come SCADA e Interfaccia uomo macchina (HMI) sono inclusi anche in questo livello. L'Higher Order Control Level è un livello aziendale che gestisce tutte le operazioni relative al business.
Osservando attentamente il diagramma sopra e il suo ogni livello e anche i livelli intermedi, i bus di comunicazione come Profibus e Ethernet industriale sono visti come collegati allo scambio di informazioni. Pertanto, il bus di comunicazione è il componente principale nell'automazione industriale per il trasferimento affidabile dei dati tra i controller, i computer e anche dai dispositivi di campo.
Control Area Network o protocollo CAN

Modello OSI (Open Systems Interconnection)
Comunicazione dei dati è il trasferimento di dati da un punto all'altro. Per supportare la comunicazione industriale, l'Organizzazione internazionale per la standardizzazione ha sviluppato un modello OSI (Open Systems Interconnection) per fornire il trasferimento di dati tra i vari nodi. Questo protocollo e framework OSI dipende dal produttore. Il protocollo CAN utilizza due livelli inferiori, ovvero i livelli fisico e di collegamento dati dei sette livelli del modello OSI.
Una Controller Area Network, o protocollo CAN, è un multi-master bus di comunicazione seriale , ed è una rete di controllori indipendenti. L'attuale versione di CAN è in uso dal 1990 ed è stata sviluppata da Bosch e Intel. Trasmette messaggi ai nodi presentati in una rete offrendo una velocità di trasmissione fino a 1 Mbps. Per una trasmissione efficace, segue metodi affidabili di rilevamento degli errori e, per l'arbitrato sulla priorità dei messaggi e il rilevamento delle collisioni, utilizza il protocollo di accesso multiplo carrier sense. A causa di queste affidabili caratteristiche di trasferimento dei dati, questo protocollo è stato utilizzato in autobus, automobili e altri sistemi automobilistici, automazione industriale e industriale, applicazioni minerarie, ecc.
Trasmissione dati CAN
Protocollo CAN non è un protocollo basato sull'indirizzo, ma un protocollo orientato al messaggio, in cui il messaggio incorporato in CAN ha il contenuto e la priorità dei dati trasferiti. Sulla ricezione dei dati sul bus, ogni nodo decide se scartare o elaborare i dati - e quindi a seconda del sistema, il messaggio di rete è destinato al singolo nodo oa molti altri nodi. La comunicazione CAN consente a un particolare nodo di richiedere le informazioni da qualsiasi altro nodo inviando RTR (Remote Transmit Request).

Trasmissione dati tramite protocollo CAN
Offre la trasmissione automatica dei dati senza arbitrato trasferendo il messaggio con la priorità più alta e supportando e aspettando il messaggio con priorità più bassa. In questo protocollo, il dominante è uno 0 logico e il recessivo è un 1. Quando un nodo trasmette un bit recessivo e un altro trasmette un bit di dominio, il bit dominante vince. Uno schema di arbitrato basato sulla priorità decide se verrà concessa l'autorizzazione a continuare la trasmissione se due o più dispositivi iniziano a trasmettere contemporaneamente.
CAN Message Frame
Una rete di comunicazione CAN può essere configurata in diversi formati di frame o messaggi.
- Formato standard o base frame o CAN 2.0 A
- Formato frame esteso o CAN 2.0 B

Formato standard o base frame o CAN 2.0 A
La differenza tra questi due formati è che la lunghezza dei bit, ovvero il frame di base supporta la lunghezza di 11 bit per l'identificatore, mentre il frame esteso supporta la lunghezza di 29 bit per l'identificatore, che è costituito da un'estensione di 18 bit e un identificatore a 11 bit. Il bit IDE differisce dal formato del frame esteso CAN e dal formato del frame base CAN in cui l'IDE viene trasmesso come dominante in un caso di frame a 11 bit e recessivo in un caso di frame a 29 bit. È anche possibile inviare o ricevere messaggi in formato frame di base da alcuni controller CAN che supportano formati frame estesi.

Formato frame esteso o CAN 2.0 B
Il protocollo CAN ha quattro tipi di frame: frame di dati, frame remoto, frame di errore e frame di sovraccarico. Il frame di dati contiene i dati del nodo di trasmissione Il frame remoto richiede un identificatore specifico Il frame di errore di trasmissione rileva eventuali errori del nodo e il frame di sovraccarico si attiva quando il sistema inserisce un ritardo tra i dati o il frame remoto. La comunicazione CAN può collegare fino a 2032 dispositivi su una singola rete in teoria, ma in pratica è limitata a 110 nodi a causa dei ricetrasmettitori hardware. Supporta il cablaggio fino a 250 metri con la velocità di trasmissione di 250 Kbps con una velocità in bit di 10 Kbps è la lunghezza massima di 1 km e la più breve con 1 Mbps è di 40 metri.
Automazione e controllo industriale tramite protocollo CAN
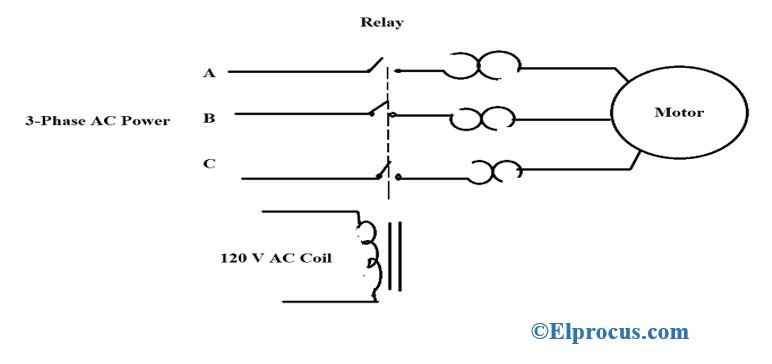
Questo progetto è implementato per controllare l'industriale carichi che vengono azionati dal motore CC in base alle variazioni di temperatura del processo. Vari sistemi di controllo del processo dipendono dalla temperatura. Supponiamo che, nel caso di un serbatoio di agitazione, dopo aver raggiunto una certa temperatura, il motore DC debba essere acceso per ruotare l'agitatore. Quindi questo progetto raggiunge questo obiettivo con l'uso del protocollo CAN che è una comunicazione a basso costo altamente efficiente e affidabile.
In questo progetto vengono utilizzati due microcontrollori, uno per l'acquisizione dei dati di temperatura e l'altro per controllo del motore DC . Il controller CAN MCP2515 e il ricetrasmettitore CAN MCP2551 sono collegati a entrambi i microcontrollori per implementare la comunicazione CAN per lo scambio dei dati.

Automazione e controllo industriale tramite protocollo CAN
Il microcontrollore trasmittente monitora continuamente le temperature con l'uso di LM35 termometro convertendo i valori analogici in digitali con ADC collegato. Questi valori vengono confrontati con i valori impostati programmati nel microcontrollore e questi valori vengono violati quando il microcontrollore invia o trasmette i dati al ricevitore microcontrollore laterale tramite controller CAN e unità transceiver.
La comunicazione CAN lato ricevente riceve i dati e li trasferisce al microcontrollore che elabora ulteriormente i dati e controlla il motore DC tramite un IC motor-driver. È anche possibile cambiare la direzione del motore con il driver IC controllato dal microcontrollore.
Pertanto il protocollo CAN consente la comunicazione peer-to-peer collegando diversi nodi in ambiente industriale. Questo tipo di comunicazione può essere implementato anche in altri sistemi di automazione come casa o edificio , fabbrica, ecc. Ci auguriamo che questo articolo possa aver fornito una migliore comprensione dell'automazione industriale con la comunicazione CAN. Scrivici per ulteriori informazioni e domande.
Crediti fotografici:
- Automazione e controllo industriale di wlimg
- Architettura di automazione industriale di siemens
- Modello Open Systems Interconnection (OSI) di mangiare
- Trasmissione dati protocollo CAN tramite can-cia
- Formato standard o base frame o CAN 2.0 A di technologyuk
- Formato frame esteso o CAN 2.0 B di banda larga





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}