
CAN o Controller Area Network è una tecnologia di rete seriale half-duplex ad alta velocità a due fili. Fondamentalmente è utilizzato nella comunicazione tra diversi dispositivi in una regione a basso raggio, come in un'automobile. Un protocollo CAN è un protocollo CSMA-CD / ASM o arbitrati di rilevamento delle collisioni di accesso multiplo di rilevamento della portante sul protocollo di priorità dei messaggi. CSMA garantisce che ogni nodo debba attendere un determinato periodo prima di inviare qualsiasi messaggio. Il rilevamento delle collisioni garantisce che la collisione venga evitata selezionando i messaggi in base alla priorità prescritta.
Fornisce una velocità di segnalazione da 125 kbps a 1 Mbps. Fornisce 2048 identificatori di messaggi diversi.
È lo standard ISO-11898 e utilizza il modello Open Systems Interconnection a 7 livelli.
Storia:
È stata sviluppata da Robert Bosch nel 1982 e ufficialmente rilasciata dalla Society of Automotive Engineers di Detroit nel 1986. La prima automobile che integra il CAN bus è stata prodotta da Mercedes Benz nel 1992.
Architettura ISO 11898:

Fonte immagine - theremino
L'architettura a strati è composta da tre strati
- Livello applicazione : Interagisce con il sistema operativo o l'applicazione del dispositivo CAN.
- Livello di collegamento dati : Collega i dati effettivi al protocollo in termini di invio, ricezione e convalida dei dati.
- Livello fisico : Rappresenta l'hardware reale.
Il frame CAN standard è costituito dai seguenti bit:
 Il frame CAN standard è costituito dai seguenti bit:
Il frame CAN standard è costituito dai seguenti bit:
- SOF- Inizio di p ame. Il messaggio parte da questo punto.
- Identificare : Decide la priorità del messaggio. Abbassare il valore binario, maggiore è la priorità. È a 11 bit.
- RTR - Richiesta di trasmissione remota. È dominante quando le informazioni sono richieste da un altro nodo. Ogni nodo riceve la richiesta, ma solo quel nodo il cui identificatore corrisponde a quello del messaggio è il nodo richiesto. Ogni nodo riceve anche la risposta. Z
- QUI - Estensione di identificazione singola. Se è dominante, significa che viene trasmesso un identificatore CAN standard senza estensione.
- R0 - bit riservato.
- DLC - Codice lunghezza dati. Definisce la lunghezza dei dati inviati. È a 4 bit
- Dati - È possibile trasmettere fino a 64 bit di dati.
- CRC - Controllo di ridondanza ciclico. Contiene il checksum (numero di bit trasmessi) dei dati dell'applicazione precedente per il rilevamento degli errori.
- ALAS - Riconoscere. È per 2 bit. È dominante se viene ricevuto un messaggio accurato.
- EOF - fine della cornice. Segna la fine del riquadro del barattolo e disabilita il riempimento dei bit.
- IFS - Inter Frame Space. Contiene il tempo necessario al controller per spostare un frame ricevuto correttamente nella posizione corretta.
5 Diversi tipi di messaggi sono:
- Data Frame : Consiste in un campo arbitrario, un campo dati, un campo CRC e i campi di riconoscimento.
- Frame remoto : Richiede la trasmissione dei dati da un altro nodo. Qui il bit RTR è recessivo.
- Frame di errore : Viene trasmesso quando viene rilevato un errore.
- Telaio di sovraccarico : Viene utilizzato per fornire un ritardo tra i messaggi. Viene trasmesso quando i nodi diventano troppo occupati.
- Cornice valida : Un messaggio è valido se il campo EOF è recessivo. Altrimenti il messaggio viene trasmesso di nuovo.
Livello fisico CAN:
CAN Bus

Fonte immagine - digital.ni
Consiste in un collegamento seriale a due fili: CAN_H e CAN_L ei loro livelli di tensione l'uno rispetto all'altro determinano se viene trasmesso un 1 o uno 0. Questa è la segnalazione differenziale. La corrente che scorre in ciascuna linea di segnale è uguale ma in direzione opposta, determinando un effetto di cancellazione del campo che è una chiave per basse emissioni di rumore. Ciò garantisce una segnalazione differenziale bilanciata che riduce l'accoppiamento del rumore e consente un'elevata velocità di trasmissione sui fili. Di solito i fili sono cavi a doppino intrecciato con una lunghezza del bus di 40 me un massimo di 30 nodi. È un cavo schermato o non schermato con un'impedenza caratteristica di 120 Ohm.
PU RICETRASMETTITORE:

CAN per veicoli di Hugo Provencher. I due fili CANH e CANL sono normalmente a 2,5 V determinati dai due transistor e dalla sorgente di tensione da 2,5 V. Fondamentalmente la differenza tra i due fili dovrebbe essere sempre 0. Il controllo del driver determina la tensione applicata ai fili CANH e CANL. Quando entrambi i transistor sono in conduzione, la caduta di tensione su 1sttransistor e il diodo è di 1,5 V, facendo in modo che il cavo CANH arrivi a 3,5 V. La caduta di tensione sui 2ndtransistor e il diodo è 1 V, facendo abbassare il cavo CANL a 1,5 V. I diodi vengono utilizzati per la protezione dall'alta tensione. Il ricevitore è un circuito discriminatore che fornisce un'uscita di 1 quando i due ingressi CANH e CANL sono uguali e un'uscita di 0 se i due ingressi sono diversi. Il blocco dominante TXD viene utilizzato per la protezione dai guasti a terra e il blocco di spegnimento termico disabilita il controllo del driver se i diodi e i transistor si surriscaldano.
Vantaggi della CAN:
- Riduce il cablaggio poiché è un controllo distribuito e questo garantisce il miglioramento delle prestazioni del sistema.
- Molti produttori di chip CAN hanno fornito il livello di collegamento dati e il livello fisico interfacciato al chip e tutto ciò che gli sviluppatori di software devono fare è solo sviluppare la codifica dell'applicazione.
- Offre la possibilità di lavorare in diversi ambienti elettrici e garantisce una trasmissione priva di rumore.
- La congestione del traffico viene eliminata poiché i messaggi vengono trasmessi in base alla loro priorità e consente all'intera rete di soddisfare i vincoli temporali.
- Fornisce una trasmissione senza errori poiché ogni nodo può verificare la presenza di errori durante la trasmissione del messaggio e inviare il frame di errore.
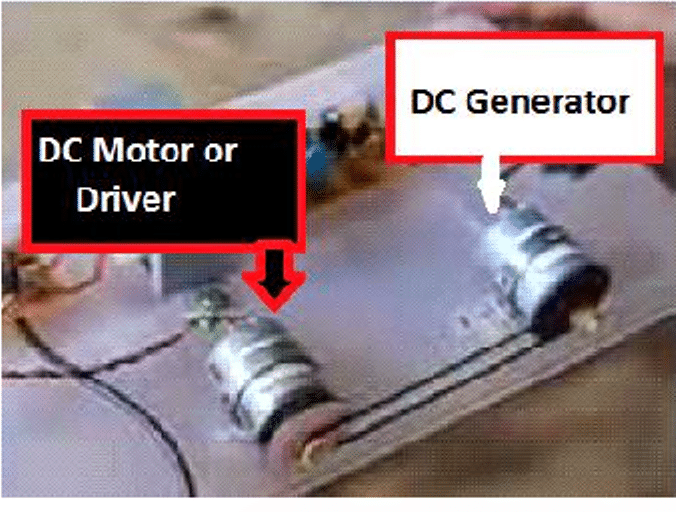
Esempio di funzionamento CAN:
Il controller Area Network ha vaste applicazioni in ambito industriale così come nei veicoli. Una delle principali applicazioni è coinvolta nella comunicazione tra i diversi dispositivi in un veicolo. Un altro può essere tra diversi microcontrollori, supponiamo per rilevare una password, utilizzato per soddisfare qualsiasi requisito come l'apertura di una porta chiusa con una password o l'accensione di una lampadina, ecc.

Circuito di rete dell'area del controller
L'applicazione di base è costituita da 3 microcontrollori che comunicano tra loro utilizzando due fili come in una rete CAN. Il 1stil microcontrollore è interfacciato con una tastiera, la 2ndcon un LCD e il terzo con un cicalino e un relè che aziona una lampada. Quando si immette una password nella tastiera, il 2ndil microcontrollore funge da ricevitore e riceve bit per bit il messaggio trasmesso dall'1sttrasmettitore e visualizza il messaggio sul display LCD. Quando viene trasmesso l'intero messaggio, il 2ndil microcontrollore effettua la verifica e se la password è sbagliata invia un segnale al 3rdil microcontrollore, che a sua volta invia il buzzer, si accende con questo segnale. Quando la password è corretta, 3rdil microcontrollore accende il relè che a sua volta accende la lampada.




![Diodi a contatto puntuale [Storia, costruzione, circuito di applicazione]](https://electronics.jf-parede.pt/img/electronics-tutorial/38/point-contact-diodes-history-construction-application-circuit-1.jpg)




{kind=link}
{kind=link}