In questo post discutiamo la realizzazione di un semplice circuito di controllo della velocità del motore a induzione trifase, che può essere applicato anche per un motore a induzione monofase o letteralmente per qualsiasi tipo di motore CA.
Quando si tratta di controllo della velocità dei motori a induzione , normalmente vengono impiegati convertitori a matrice, che coinvolgono molti stadi complessi come filtri LC, array bidirezionali di interruttori (utilizzando IGBT) ecc.
Tutti questi sono impiegati per ottenere in definitiva un segnale CA tagliato il cui ciclo di lavoro potrebbe essere regolato utilizzando un circuito microcontrollore complesso, fornendo infine il controllo della velocità del motore richiesto.
Tuttavia, possiamo sperimentare e provare a realizzare un controllo della velocità del motore a induzione trifase attraverso un concetto molto più semplice utilizzando i circuiti integrati optoaccoppiatori avanzati del rilevatore di zero crossing, un triac di potenza e un circuito PWM.
Utilizzo dell'accoppiatore ottico del rivelatore Zero Crossing
Grazie alla serie MOC di optoaccoppiatori che ha reso i circuiti di controllo triac estremamente sicuri e facili da configurare e consentono un'integrazione PWM senza problemi per i controlli previsti.
In uno dei miei post precedenti ho discusso di un semplice file Circuito del controller del motore con avviamento dolce PWM che ha implementato l'IC MOC3063 per fornire un avvio graduale efficace sul motore collegato.
Anche qui utilizziamo un metodo identico per applicare il circuito di controllo della velocità del motore a induzione trifase proposto, l'immagine seguente mostra come questo può essere fatto:
Nella figura possiamo vedere tre stadi opto accoppiatori MOC identici configurati nella loro modalità di regolatore triac standard e il lato di ingresso integrato con un semplice circuito IC 555 PWM .
I 3 circuiti MOC sono configurati per gestire l'ingresso CA trifase e fornire lo stesso al motore a induzione collegato.
L'ingresso PWM sul lato di controllo del LED isolato dell'opto determina il rapporto di taglio dell'ingresso CA trifase che viene elaborato dal MOC ICS.
Utilizzo del controller PWM IC 555 (commutazione a tensione zero)
Ciò implica, modificando il Potenziometro PWM associato all'IC 555 si può controllare efficacemente la velocità del motore a induzione.
L'uscita al suo pin n. 3 ha un ciclo di lavoro variabile che a sua volta commuta i triac di uscita di conseguenza, con conseguente aumento del valore RMS CA o diminuzione dello stesso.
L'aumento dell'RMS attraverso PWM più larghi consente di acquisire una velocità maggiore sul motore, mentre la diminuzione dell'RMS AC attraverso PWM più stretti produce un effetto opposto, cioè fa rallentare proporzionalmente il motore.
Le funzionalità di cui sopra sono implementate con molta precisione e sicurezza poiché ai circuiti integrati sono assegnate molte funzionalità interne sofisticate, specificatamente destinate pilotaggio di triac e carichi induttivi pesanti come motori a induzione, solenoidi, valvole, contattori, relè a stato solido ecc.
L'IC garantisce anche un funzionamento perfettamente isolato per lo stadio DC che consente all'utente di effettuare le regolazioni senza il timore di una scossa elettrica.
Il principio può anche essere utilizzato in modo efficiente per controllare la velocità del motore monofase, impiegando un singolo MOC IC invece di 3.
Il design è effettivamente basato su azionamento del triac proporzionale al tempo teoria. Il circuito PWM IC555 superiore può essere regolato per produrre un ciclo di lavoro del 50% a una frequenza molto più alta, mentre il circuito PWM inferiore può essere utilizzato per implementare l'operazione di controllo della velocità del motore a induzione attraverso le regolazioni del potenziometro associato.
Si raccomanda che questo IC 555 abbia una frequenza relativamente inferiore rispetto al circuito IC 555 superiore. Questo può essere fatto aumentando il condensatore del pin # 6/2 a circa 100nF.

NOTA: L'AGGIUNTA DI INDUTTORI ADATTI IN SERIE CON I FILI DI FASE PU MIGLIORARE DRASTICAMENTE LE PRESTAZIONI DI CONTROLLO DELLA VELOCITÀ DEL SISTEMA.
Forma d'onda presunta e controllo di fase utilizzando il concetto di cui sopra:

Il metodo sopra spiegato per controllare un motore a induzione trifase è in realtà piuttosto rozzo poiché lo è nessun controllo V / Hz .
Impiega semplicemente l'accensione / spegnimento della rete a velocità diverse per produrre una potenza media al motore e controllare la velocità alterando questa CA media al motore.
Immagina di accendere / spegnere il motore manualmente 40 volte o 50 volte al minuto. Ciò comporterebbe il rallentamento del motore fino a un valore medio relativo, ma che si muove continuamente. Il principio di cui sopra funziona allo stesso modo.
Un approccio più tecnico consiste nel progettare un circuito che assicuri un corretto controllo del rapporto V / Hz e lo regoli automaticamente a seconda della velocità di scorrimento o di eventuali fluttuazioni di tensione.
Per questo utilizziamo fondamentalmente le seguenti fasi:
- Circuito driver IGBT H-Bridge o Full Bridge
- Stadio generatore trifase per l'alimentazione del circuito a ponte completo
- Processore PWM V / Hz
Utilizzo di un circuito di controllo IGBT a ponte completo
Se le procedure di impostazione del design basato su triac di cui sopra ti sembrano scoraggianti, puoi provare il seguente controllo della velocità del motore a induzione basato su PWM a ponte intero:

Il circuito mostrato nella figura sopra utilizza un driver full-bridge a chip singolo IC IRS2330 (l'ultima versione è 6EDL04I06NT) che ha tutte le caratteristiche integrate per soddisfare un funzionamento sicuro e perfetto del motore trifase.
L'IC necessita solo di un ingresso logico trifase sincronizzato attraverso i suoi pinout HIN / LIN per generare l'uscita oscillante trifase richiesta, che alla fine viene utilizzata per il funzionamento della rete IGBT a ponte intero e del motore trifase collegato.
Il iniezione PWM di controllo della velocità è implementato attraverso 3 stadi driver NPN / PNP a mezzo ponte separati, controllati con un feed SPWM da un generatore PWM IC 555 come visto nei nostri progetti precedenti. Questo livello PWM può essere infine utilizzato per controllare la velocità del motore a induzione.
Prima di apprendere il metodo di controllo della velocità effettiva per il motore a induzione, capiamo prima come funziona l'automatico Controllo V / Hz può essere ottenuto utilizzando alcuni circuiti IC 555, come discusso di seguito
Il circuito del processore PWM V / Hz automatico (circuito chiuso)
Nelle sezioni precedenti abbiamo appreso i progetti che aiuteranno il motore a induzione a muoversi alla velocità specificata dal produttore, ma non si regolerà secondo un rapporto V / Hz costante a meno che il seguente processore PWM non sia integrato con l'H -Bridge PWM feed di ingresso.

Il circuito sopra è un semplice Generatore PWM utilizzando un paio di IC 555 . L'IC1 genera la frequenza PWM che viene convertita in onde triangolari al pin # 6 di IC2 con l'aiuto di R4 / C3.
Queste onde triangolari vengono confrontate con l'ondulazione sinusoidale al pin # 5 di IC2. Queste ondulazioni campione vengono acquisite rettificando la rete CA trifase in un'ondulazione CA da 12 V e vengono alimentate al pin n. 5 dell'IC2 per l'elaborazione richiesta.
Confrontando le due forme d'onda, viene opportunamente dimensionata Viene generato SPWM al pin # 3 di IC2, che diventa il PWM di pilotaggio per la rete H-bridge.
Come funziona il circuito V / Hz
Quando l'alimentazione viene attivata, il condensatore sul pin # 5 inizia rendendo una tensione zero sul pin # 5 che causa il valore SPWM più basso al Circuito a ponte H. , che a sua volta consente al motore a induzione di avviarsi con un avvio dolce graduale lento.
Quando questo condensatore si carica, il potenziale sul pin # 5 aumenta, il che aumenta proporzionalmente l'SPWM e consente al motore di aumentare gradualmente la velocità.
Possiamo anche vedere un circuito di feedback del tachimetro che è anche integrato con il pin # 5 dell'IC2.
Questo tachimetro monitora la velocità del rotore o la velocità di scorrimento e genera ulteriore tensione al pin n. 5 di IC2.
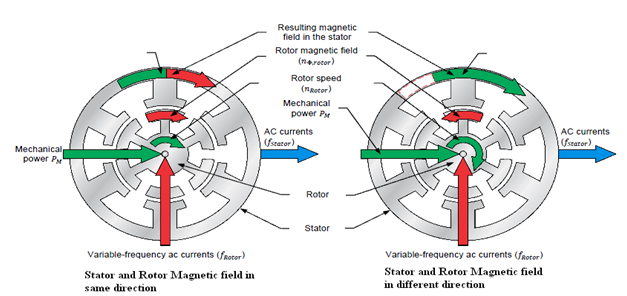
Ora, all'aumentare della velocità del motore, la velocità di scorrimento cerca di sincronizzarsi con la frequenza dello statore e nel processo inizia ad aumentare la velocità.
Questo aumento dello scorrimento di induzione aumenta proporzionalmente la tensione del tachimetro, il che a sua volta fa aumentare IC2 Uscita SPWM e questo a sua volta aumenta ulteriormente la velocità del motore.
La regolazione di cui sopra cerca di mantenere il rapporto V / Hz a un livello abbastanza costante fino a quando l'SPWM da IC2 non è in grado di aumentare ulteriormente.
A questo punto la velocità di scorrimento e la velocità dello statore acquisiscono uno stato stazionario e questo viene mantenuto fino a quando la tensione di ingresso o la velocità di scorrimento (dovuta al carico) non vengono alterate. Nel caso in cui questi vengano alterati, il circuito del processore V / Hz entra di nuovo in azione e inizia a regolare il rapporto per mantenere la risposta ottimale della velocità del motore a induzione.
Il contagiri
Il Circuito contagiri può anche essere costruito in modo economico utilizzando il seguente semplice circuito e integrato con gli stadi circuitali sopra spiegati:

Come implementare il controllo della velocità
Nei paragrafi precedenti abbiamo compreso il processo di regolazione automatica che si può ottenere integrando a feedback del contagiri a un circuito di controllo SPWM autoregolante.
Ora impariamo come controllare la velocità di un motore a induzione variando la frequenza, il che alla fine costringerà l'SPWM a scendere e mantenere il corretto rapporto V / Hz.
Il diagramma seguente spiega la fase di controllo della velocità:

Qui possiamo vedere un circuito generatore trifase che utilizza IC 4035 la cui frequenza di sfasamento può essere variata variando l'ingresso del clock al suo pin n. 6.
I segnali trifase vengono applicati attraverso i gate IC 4049 per produrre i feed HIN e LIN richiesti per la rete di driver full-bridge.
Ciò implica che variando opportunamente la frequenza di clock dell'IC 4035, possiamo effettivamente modificare la frequenza trifase operativa del motore a induzione.
Questo è implementato attraverso un semplice circuito astabile IC 555 che alimenta una frequenza regolabile al pin # 6 di IC 4035 e consente di regolare la frequenza attraverso il potenziometro da 100K collegato. Il condensatore C deve essere calcolato in modo tale che l'intervallo di frequenza regolabile rientri nelle specifiche corrette del motore a induzione collegato.
Quando il potenziometro di frequenza viene variato, cambia anche la frequenza effettiva del motore a induzione, che cambia corrispondentemente la velocità del motore.
Ad esempio, quando la frequenza viene ridotta, provoca una riduzione della velocità del motore, che a sua volta fa sì che l'uscita del tachimetro riduca la tensione proporzionalmente.
Questa riduzione proporzionale dell'uscita del tachimetro costringe l'SPWM a restringersi e quindi abbassa proporzionalmente l'uscita di tensione al motore.
Questa azione a sua volta garantisce il mantenimento del rapporto V / Hz mentre si controlla la velocità del motore a induzione tramite il controllo della frequenza.
Avvertenza: il concetto di cui sopra è concepito solo su presupposti teorici, procedere con cautela.
Se hai ulteriori dubbi in merito al design di questo controller di velocità del motore a induzione trifase, sei il benvenuto a pubblicare lo stesso attraverso i tuoi commenti.
Precedente: Come progettare un circuito UPS (Uninterruptible Power Supply) Successivo: attivazione / disattivazione di due carichi alternativi con IC 555