Il circuito VFD trifase presentato ( progettato da me ) può essere utilizzato per controllare la velocità di qualsiasi motore CA trifase con spazzole o anche un motore CA senza spazzole. L'idea è stata richiesta dal Sig. Tom
Utilizzando il VFD
Il circuito VFD trifase proposto può essere universalmente applicato per la maggior parte dei motori CA trifase in cui l'efficienza di regolazione non è troppo critica.
Può essere utilizzato specificamente per il controllo velocità del motore a induzione a gabbia di scoiattolo con una modalità ad anello aperto, e possibilmente anche in modalità ad anello chiuso che sarà discussa nella parte successiva dell'articolo.
Moduli richiesti per inverter trifase
Per la progettazione del VFD trifase proposto o del circuito di azionamento a frequenza variabile sono essenzialmente necessari i seguenti stadi fondamentali del circuito:
- Circuito del controller di tensione PWM
- Circuito di pilotaggio a ponte H a 3 fasi lato alto / basso
- Circuito generatore trifase
- Circuito convertitore da tensione a frequenza per la generazione del parametro V / Hz.
Impariamo i dettagli di funzionamento delle fasi precedenti con l'aiuto della seguente spiegazione:
Un semplice circuito del controller di tensione PWM può essere visto nel diagramma riportato di seguito:

Il controller PWM
Ho già incorporato e spiegato il funzionamento del precedente stadio generatore PWM che è fondamentalmente progettato per generare un'uscita PWM variabile attraverso il pin3 di IC2 in risposta al potenziale applicato al pin5 dello stesso IC.
Il preset 1K mostrato nel diagramma è la manopola di controllo RMS, che può essere opportunamente regolata per acquisire la quantità proporzionale desiderata di tensione di uscita sotto forma di PWM al pin3 di IC2 per ulteriori elaborazioni. Questo è impostato per produrre un'uscita corrispondente che può essere equivalente alla rete 220V o 120V AC RMS.
Il circuito driver H-Bridge
Il diagramma seguente mostra un circuito di pilotaggio trifase con ponte H a chip singolo che utilizza l'IC IRS2330.
Il design sembra semplice poiché la maggior parte delle complessità sono gestite dai circuiti sofisticati integrati nei chip.
Un segnale trifase ben calcolato viene applicato agli ingressi HIN1 / 2/3 e LIN1 / 2/3 dell'IC attraverso uno stadio generatore di segnale trifase.
Le uscite di IC IRS2330 può essere visto integrato con 6 mosfet o rete bridge IGBT, i cui scarichi sono opportunamente configurati con il motore da comandare.
I gate mosfet / IGBT lato basso sono integrati con il pin IC2 n. 3 dello stadio del circuito generatore PWM sopra discusso per avviare l'iniezione PWM nello stadio mosfet del ponte. Questa regolazione alla fine aiuta il motore a ottenere la velocità desiderata secondo le impostazioni (tramite il preset 1 k nel primo diagramma).

Nello schema seguente viene visualizzato il circuito generatore di segnale trifase richiesto.

Configurazione del circuito del generatore trifase
Il generatore trifase è costruito attorno a una coppia di chip CMOS CD4035 e CD4009 che genera segnali trifase accuratamente dimensionati attraverso i pinout mostrati.
La frequenza dei segnali trifase dipende dai clock di ingresso alimentati che dovrebbero essere 6 volte il segnale trifase previsto. Ciò significa che se la frequenza trifase richiesta è 50 Hz, il clock di ingresso dovrebbe essere 50 x 6 = 300 Hz.
Implica anche che i suddetti clock possano essere variati per variare la frequenza effettiva del circuito integrato di pilotaggio che a sua volta sarebbe responsabile della variazione della frequenza operativa del motore.
Tuttavia, poiché la suddetta alterazione di frequenza deve essere automatica in risposta alla variazione della tensione, diventa essenziale un convertitore da tensione a frequenza. La fase successiva discute un circuito convertitore di frequenza semplice e accurato per l'implementazione richiesta.
Come creare un rapporto V / F costante
Tipicamente nei motori a induzione, al fine di mantenere un'efficienza ottimale della velocità del motore e della coppia, è necessario controllare la velocità di scorrimento o la velocità del rotore, il che a sua volta diventa possibile mantenendo un rapporto V / Hz costante. Poiché il flusso magnetico dello statore è sempre costante indipendentemente dalla frequenza di alimentazione in ingresso, la velocità del rotore diventa facilmente controllabile da mantenendo costante il rapporto V / Hz .
In una modalità ad anello aperto, ciò può essere fatto approssimativamente mantenendo rapporti V / Hz predeterminati e implementandoli manualmente. Ad esempio nel primo diagramma questo può essere fatto regolando opportunamente R1 e 1K preset. R1 determina la frequenza e 1K regola l'RMS dell'uscita, quindi regolando opportunamente i due parametri possiamo imporre manualmente la quantità V / Hz richiesta.
Tuttavia, per ottenere un controllo relativamente accurato della coppia e della velocità di un motore a induzione, dobbiamo implementare una strategia ad anello chiuso, in cui i dati sulla velocità di scorrimento devono essere inviati al circuito di elaborazione per una regolazione automatica del rapporto V / Hz in modo che questo il valore rimane sempre quasi costante.
Implementazione del feedback a circuito chiuso
Il primo diagramma in questa pagina può essere opportunamente modificato per progettare la regolazione automatica V / Hz ad anello chiuso come mostrato di seguito:

Nella figura sopra, il potenziale sul pin # 5 di IC2 determina la larghezza dell'SPWM che viene generato sul pin # 3 dello stesso IC. Gli SPWM vengono generati confrontando il campione di ondulazione a 12V della rete sul pin # 5 con l'onda triangolare sul pin # 7 di IC2, e questo viene inviato ai mosfet del lato basso per il controllo del motore.
Inizialmente questo SPWM è impostato a un livello regolato (utilizzando 1K perset) che innesca le porte IGBT lato basso del ponte trifase per avviare il movimento del rotore al livello di velocità nominale specificato.
Non appena il rotore del rotore inizia a ruotare, il tachimetro collegato con il meccanismo del rotore provoca lo sviluppo di una quantità aggiuntiva proporzionale di tensione sul pin # 5 di IC2, questo fa sì che gli SPWM si allarghino proporzionalmente causando più tensione alle bobine dello statore del motore. Ciò provoca un ulteriore aumento della velocità del rotore provocando una maggiore tensione sul pin # 5 di IC2, e questo continua fino a quando la tensione equivalente SPWM non è più in grado di aumentare e la sincronizzazione del rotore dello statore raggiunge uno stato stazionario.
La procedura di cui sopra si autoregola durante i periodi di funzionamento del motore.
Come realizzare e integrare il contagiri
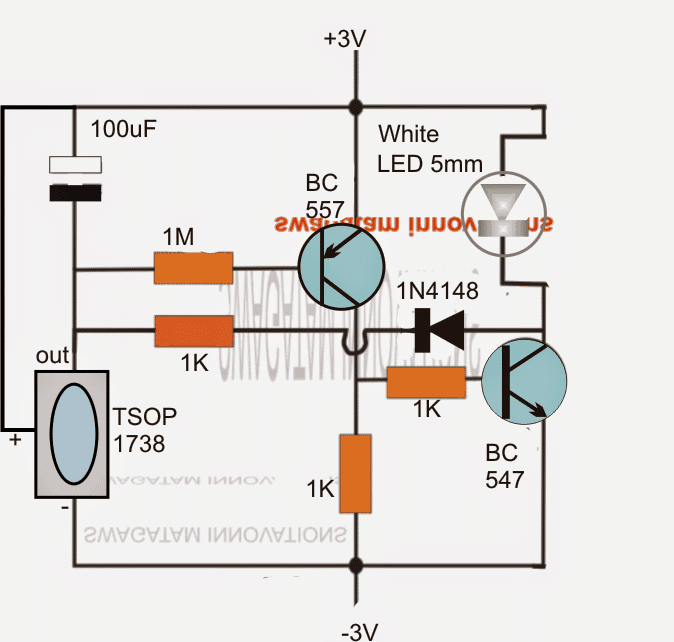
Un semplice design del tachimetro può essere visto nel diagramma seguente, questo potrebbe essere integrato con il meccanismo del rotore in modo tale che la frequenza di rotazione sia in grado di alimentare la base del BC547.

Qui i dati sulla velocità del rotore vengono raccolti da un sensore ad effetto hall o da una rete di sensori / LED IR e vengono inviati alla base di T1.
T1 oscilla a questa frequenza e attiva il circuito tachimetrico realizzato configurando opportunamente un circuito monostabile IC 555.
L'uscita dal tachimetro di cui sopra varia proporzionalmente in risposta alla frequenza di ingresso alla base di T1.
All'aumentare della frequenza, aumenta anche la tensione all'uscita D3 dell'estrema destra e viceversa, e aiuta a mantenere il rapporto V / Hz a un livello relativamente costante.
Come controllare la velocità
La velocità del motore utilizzando V / F costante può essere ottenuta alterando l'ingresso di frequenza all'ingresso di clock di IC 4035. Ciò può essere ottenuto alimentando una frequenza variabile da un circuito astabile IC 555 o da qualsiasi circuito astabile standard all'ingresso di clock di IC 4035.
La modifica della frequenza cambia effettivamente la frequenza di funzionamento del motore che riduce di conseguenza la velocità di scorrimento.
Questo viene rilevato dal contagiri, e il contagiri riduce proporzionalmente il potenziale al pin # 5 dell'IC2 che a sua volta riduce proporzionalmente il contenuto di SPWM sul motore, e di conseguenza la tensione per il motore viene ridotta, garantendo la variazione della velocità del motore con il corretto rapporto V / F richiesto.
Un convertitore da V a F fatto in casa

Nel circuito convertitore da tensione a frequenza di cui sopra viene utilizzato un IC 4060 e la sua resistenza dipendente dalla frequenza viene influenzata tramite un gruppo LED / LDR per le conversioni previste.
Il gruppo LED / LDR è sigillato all'interno di una scatola a prova di luce e l'LDR è posizionato su un resistore dipendente dalla frequenza da 1M dell'IC.
Poiché la risposta LDR / LDR è abbastanza lineare, l'illuminazione variabile del LED sull'LDR genera una frequenza proporzionalmente variabile (crescente o decrescente) sul pin3 dell'IC.
La FSD o la gamma V / Hz del palco potrebbe essere impostata impostando opportunamente la resistenza 1M o anche il valore C1.
Il LED è la tensione è derivata e illuminata attraverso i PWM dal primo stadio del circuito PWM. Ciò implica che al variare dei PWM, varierà anche l'illuminazione del LED, il che a sua volta darebbe luogo a una frequenza proporzionalmente crescente o decrescente al pin3 dell'IC 4060 nel diagramma sopra.
Integrazione del convertitore con VFD
Questa frequenza variabile dall'IC 4060 ora deve semplicemente essere integrata con l'ingresso di clock IC CD4035 del generatore trifase.
Le fasi precedenti costituiscono gli ingredienti principali per la realizzazione di un circuito VFD trifase.
Ora, sarebbe importante discutere riguardo al DC BUS richiesto per l'alimentazione dei controllori motore IGBT e le procedure di impostazione per l'intero progetto.
Il DC BUS applicato attraverso le guide del ponte H IGBT può essere ottenuto rettificando l'ingresso di rete trifase disponibile utilizzando la seguente configurazione del circuito. Le guide IGBT DC BUS sono collegate attraverso i punti indicati come 'carico'

Per una sorgente monofase la rettifica può essere implementata utilizzando una configurazione di rete standard a ponte a 4 diodi.
Come impostare il circuito VFD trifase proposto
Può essere fatto secondo le seguenti istruzioni:
Dopo aver applicato la tensione del bus CC agli IGBT (senza il motore collegato), regolare la preimpostazione PWM 1k finché la tensione sui binari non diventa uguale alle specifiche di tensione del motore previste.
Quindi regolare il preset IC 4060 1M per regolare uno qualsiasi degli ingressi IC IRS2330 al livello di frequenza corretto richiesto secondo le specifiche del motore fornite.
Dopo che le procedure di cui sopra sono state completate, il motore specificato può essere collegato e alimentato con diversi livelli di tensione, parametro V / Hz e confermato per un funzionamento automatico V / Hz sul motore collegato.
Precedente: Come costruire un circuito Grow Light Successivo: Esplorazione del circuito dell'addolcitore dell'acqua

![Circuito indicatore pressione atmosferica [circuito barometro LED]](https://electronics.jf-parede.pt/img/3-phase-power/40/atmospheric-pressure-indicator-circuit-led-barometer-circuit-1.jpg)




![IC 4060 Latching Problem [risolto]](https://electronics.jf-parede.pt/img/timer-delay-relay/35/ic-4060-latching-problem.jpg)