I servomotori sono dispositivi meccanici autonomi che vengono utilizzati per controllare le macchine con grande precisione. Questi si trovano in molte applicazioni, dai giocattoli all'automazione industriale. Esistono vari tipi di motore, ma i servomotori sono progettati appositamente per una posizione angolare specifica per il controllo delle macchine. Solitamente il servomotore viene utilizzato per controllare il movimento angolare da 0 ° a 180 ° e da 0 ° a 90 °. Il principio di funzionamento del servomotore basato sul PWM ( modulazione della larghezza di impulso ) impulsi.

Servomotore
Interfacciamento servomotore con microcontrollore 8051
Un servomotore è uno dei motori più comunemente usati per un movimento angolare preciso. Il vantaggio dell'utilizzo di un servomotore è che la posizione angolare del motore può essere controllata senza alcun meccanismo di feedback. I servomotori vengono solitamente utilizzati in applicazioni commerciali e industriali . Sono anche ampiamente usati come nei sistemi di azionamento come robot, aeroplani ecc.

Interfacciamento del servomotore con il microcontrollore 8051
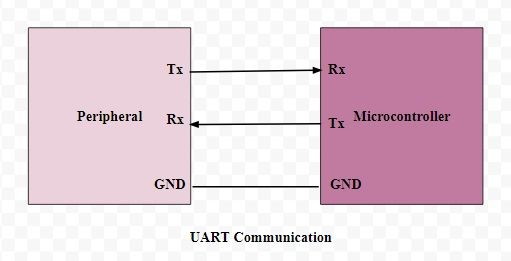
Il principio di funzionamento e il funzionamento del servomotore Hobby è molto semplice, consisteva in tre fili di cui due (nero e rosso) utilizzati per fornire alimentazione e il terzo filo è utilizzato per fornire il segnale di controllo. Le onde PWM (Pulse Width Modulated) vengono utilizzate come segnali di controllo e la posizione angolare è definita dalla larghezza dell'impulso all'ingresso di controllo. In questo articolo, stiamo usando un servomotore con angolo di rotazione da 0-180 ° e la posizione angolare può essere controllata variando i cicli di lavoro da 1ms a 2ms.
Qui il servomotore che si interfaccia con Microcontrollore 8051 , il filo nero collegato al pin di terra e il motore ricevono l'alimentazione dal filo rosso. Il controllo del servomotore collegato port0 del microcontrollore 8051. L'oscillatore a cristallo da 11,0592 MHz viene utilizzato per fornire il clock pulsato al microcontrollore e condensatori ceramici da 22 pf utilizzati per stabilizzare il funzionamento del cristallo. Il condensatore da 10KΩ e 10uf viene utilizzato per fornire l'alimentazione al ripristino al microcontrollore.
Controllo di un servomotore con rotazioni angolari
Il principio di funzionamento del servomotore dipende principalmente dai cicli di lavoro. Utilizza le onde PWM (Pulse Width Modulated) come segnali di controllo. L'angolo di rotazione è determinato dall'ampiezza dell'impulso del perno di controllo. Qui il servomotore utilizzato per l'angolo di rotazione da 0 a 180 gradi. Possiamo controllare la posizione angolare precisa variando l'impulso da 1ms a 2ms.

Controllo di un servomotore con rotazioni angolari
Programmazione servomotore con rotazioni angolari
#includere
Sbit servomotor_pin = P0 ^ 5
Void delay (unsigned int)
Void servo_delay (unsigned int)
Void main ()
{
Servomotor_pin = 0x00
Fare
{
// gira a 0 °
Servomotor_pin = 0x01
Ritardo_sevo (50)
Servomotor_pin = 0x00
Ritardo (1000)
// gira a 90 gradi
Servomotor_pin = 0x01
Ritardo_sevo (82)
Servomotor_pin = 0x00
Ritardo (1000)
// gira a 180 gradi
Servomotor_pin = 0x01
Ritardo_sevo (110)
Servomotor_pin = 0x00
Ritardo (1000)
Mentre (1)
}
}
Void delay (unsigned int a)
{
Int senza segno p
Per (p = 0p
}
Void servo_delay (unsigned int a)
{
Int senza segno p
Per (p = 0p
}
Principio di funzionamento del servomotore
Il principio di funzionamento del servomotore dipende principalmente dalla 'regola della mano sinistra di Fleming'. Fondamentalmente i servomotori sono adattati con Motori DC , un sensore di posizione, un riduttore di marcia e un circuito elettronico. I motori CC sono alimentati da una batteria e funzionano ad alta velocità e bassa coppia. Abbiamo assemblato albero e ingranaggio collegati a motori a corrente continua, quindi possiamo aumentare e diminuire gradualmente la velocità del motore.
Il sensore di posizione rileva la posizione dell'albero dalla sua posizione fissa e invia le informazioni al circuito di controllo. Il circuito di controllo decodifica i segnali di conseguenza dal sensore di posizione e confronta la posizione effettiva dei motori con la posizione preferita e controlla di conseguenza la direzione di rotazione del motore CC per ottenere la posizione necessaria. Generalmente il servomotore richiede un'alimentazione da 4,8 V a 6 V CC.
Il servomotore che controlla tramite i comandi di una porta seriale
L'intenzione principale di questo progetto è controllare il servomotore utilizzando un personal computer. Necessita di un'unica linea di controllo dal microcontrollore e linea di ingresso seriale, dalla porta seriale del personal computer per inviare comandi al circuito. La sorgente di temporizzazione è fornita dall'oscillatore a cristallo. Progettato il circuito del servomotore interfacciato al computer con l'aiuto del cavo seriale e del cambio di livello, quindi aprire il software 'Hyper Terminal' nel PC per selezionare il comportamento del computer.

Controllo del servomotore tramite comandi di una porta seriale
Una volta che i comandi vengono inviati dal personal computer (PC) al microcontrollore tramite il terminale hyper con un cambio di livello, il microcontrollore ottiene questi dati e li confronta con i dati predefiniti e genera i segnali corrispondenti per attivare il driver del motore per guidarlo al velocità desiderata. Molti progetti di microcontrollori sviluppato sulla base di servomotori come robot di bilanciamento, elicotteri da pista e così via. Possiamo utilizzare il servomotore per motivi di sicurezza interfacciandoci con la telecamera wireless in quanto possiamo controllare la digressione a 360 gradi della telecamera.
Robot di bilanciamento automatico
Il robot autobilanciante è in grado di bilanciarsi da solo con l'aiuto dei servomotori. Questo robot è stato assemblato utilizzando componenti strutturali, meccanici ed elettronici che producono una piattaforma visibilmente sbilanciata che è altamente disposta al ribaltamento in un allineamento. Le ruote del robot sono in grado di ruotare in modo indipendente in due modi, che sono azionati da un servomotore. Si otterranno informazioni sull'angolo del dispositivo rispetto al suolo sensori di inclinazione sul dispositivo.

Robot di bilanciamento automatico
Il sensore di inclinazione può essere un accelerometro, un sensore giroscopico o Sensore IR (per misurare la distanza dal suolo). I sensori inviano informazioni all'unità di controllo, che elaborerà il feedback utilizzando un algoritmo di base proporzionale, integrale, derivativo (PID) per generare segnali di controllo della posizione di compensazione ai servomotori al fine di bilanciare il dispositivo.
Applicazioni servomotore
- Viene utilizzato nelle presse per il taglio dei pezzi a misura
- Viene utilizzato nella stazione di riempimento dello zucchero
- Viene utilizzato nelle applicazioni di etichettatura
- Viene utilizzato un sistema di imballaggio con funzione di temporizzazione casuale
- È usato Usato negli aeroplani
Vantaggi del servomotore
- Se un motore riceve un carico pesante, il driver aumenterà la corrente alla bobina del motore mentre si sforza di ruotare il motore. Principalmente, non esiste una condizione fuori fase.
- Il funzionamento ad alta velocità è possibile tramite i servomotori.
Si tratta di principio di funzionamento del servomotore e interfacciamento con microcontrollore 8051 Inoltre, per qualsiasi aiuto tecnico relativo a questo articolo o progetti di elettronica progettati utilizzando dispositivi di interfacciamento come RTC, OLED, memoria flash, LCD personalizzato, display touch screen e così via. Puoi contattarci fornendo i tuoi commenti nella sezione commenti qui sotto.




![Circuito di fiori LED scintillanti [Effetto luce LED multicolore]](https://electronics.jf-parede.pt/img/3-phase-power/3B/glittering-led-flower-circuit-multicolored-led-light-effect-1.jpg)