
Servo implica un controllo del feedback di rilevamento degli errori che viene utilizzato per correggere le prestazioni di un sistema. Richiede anche un controller generalmente sofisticato, spesso un modulo dedicato progettato particolarmente per l'uso con i servomotori. I servomotori sono motori a corrente continua che consentono un controllo preciso della posizione angolare. Sono motori a corrente continua la cui velocità viene lentamente abbassata dagli ingranaggi. I servomotori hanno normalmente un taglio di rotazione da 90 ° a 180 °. Alcuni servomotori hanno anche un taglio di rotazione di 360 ° o più. Ma i servomotori non ruotano costantemente. La loro rotazione è limitata tra gli angoli fissi.
Il servomotore è un insieme di quattro cose: un normale motore a corrente continua, un riduttore a ingranaggi, un dispositivo di rilevamento della posizione e un circuito di controllo. Il motore DC è collegato a un meccanismo a ingranaggi che fornisce feedback a un sensore di posizione che è principalmente un potenziometro. Dal riduttore, l'uscita del motore viene fornita tramite la scanalatura del servo al braccio del servo. Per i servomotori standard, l'ingranaggio è normalmente realizzato in plastica mentre, per i servocomandi ad alta potenza, l'ingranaggio è in metallo.
Un servomotore è costituito da tre fili: un filo nero collegato a terra, un filo bianco / giallo collegato all'unità di controllo e un filo rosso collegato all'alimentazione.
La funzione del servomotore è quella di ricevere un segnale di controllo che rappresenta una posizione di uscita desiderata del servoalbero e applicare potenza al suo motore CC fino a quando il suo albero gira in quella posizione.
Utilizza il dispositivo di rilevamento della posizione per calcolare la posizione di rotazione dell'albero, quindi sa in che direzione deve girare il motore per spostare l'albero nella posizione indicata. L'albero normalmente non ruota liberamente intorno a un motore a corrente continua, tuttavia può semplicemente ruotare di 200 gradi.

Servomotore
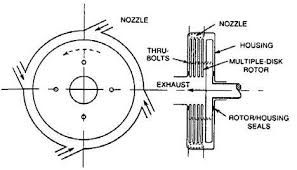
Dalla posizione del rotore, viene creato un campo magnetico rotante per generare in modo efficiente la coppia. La corrente scorre nell'avvolgimento per creare un campo magnetico rotante. L'albero trasmette la potenza di uscita del motore. Il carico viene guidato attraverso il meccanismo di trasferimento. La terra rara ad alta funzionalità o un altro magnete permanente è posizionato esternamente all'albero. L'encoder ottico controlla sempre il numero di rotazioni e la posizione dell'albero.
Funzionamento di un servomotore
Il servomotore è costituito da un motore CC, un sistema di ingranaggi, un sensore di posizione e un circuito di controllo. I motori CC vengono alimentati da una batteria e funzionano ad alta velocità e bassa coppia . Il gruppo ingranaggio e albero collegato ai motori CC riduce questa velocità fino a raggiungere una velocità sufficiente e una coppia più elevata. Il sensore di posizione rileva la posizione dell'albero dalla sua posizione definita e invia l'informazione al circuito di controllo. Di conseguenza, il circuito di controllo decodifica i segnali dal sensore di posizione e confronta la posizione effettiva dei motori con la posizione desiderata e controlla di conseguenza la direzione di rotazione del motore CC per ottenere la posizione richiesta. Il servomotore richiede generalmente un'alimentazione CC da 4,8 V a 6 V.
Controllo di un servomotore
Un servomotore viene controllato controllando la sua posizione utilizzando la tecnica di modulazione della larghezza di impulso. L'ampiezza dell'impulso applicato al motore viene variata e inviata per un periodo di tempo fisso.
L'ampiezza dell'impulso determina la posizione angolare del servomotore. Ad esempio, un'ampiezza dell'impulso di 1 ms provoca una posizione angolare di 0 gradi, mentre un'ampiezza dell'impulso di 2 ms provoca un'ampiezza angolare di 180 gradi.
Vantaggi:
- Se un carico pesante è posto sul motore, il driver aumenterà la corrente alla bobina del motore mentre tenta di ruotare il motore. Non esiste una condizione fuori fase.
- È possibile il funzionamento ad alta velocità.
Svantaggi:
- Poiché il servomotore cerca di ruotare in base agli impulsi di comando ma è in ritardo, non è adatto per il controllo di precisione della rotazione.
- Costo maggiore.
- Quando è fermo, il rotore del motore continua a muoversi avanti e indietro di un impulso, quindi non è adatto se è necessario prevenire le vibrazioni
7 Applicazioni dei servomotori
I servomotori vengono utilizzati in applicazioni che richiedono rapide variazioni di velocità senza che il motore si surriscaldi.
- Nelle industrie vengono utilizzati in macchine utensili, confezionamento, automazione di fabbrica, movimentazione dei materiali, trasformazione della stampa, linee di assemblaggio e molte altre applicazioni complesse, robotica, macchinari CNC o produzione automatizzata.
- Sono anche utilizzati negli aeroplani radiocomandati per controllare il posizionamento e il movimento degli ascensori.
- Sono utilizzati nei robot per la loro fluidità di accensione e spegnimento e per il posizionamento accurato.
- Sono anche utilizzati dall'industria aerospaziale per mantenere il fluido idraulico nei loro sistemi idraulici.
- Sono utilizzati in molti giocattoli radiocomandati.
- Sono utilizzati in dispositivi elettronici come lettori DVD o Blue-ray Disc per estendere o riprodurre i vassoi del disco.
- Vengono anche utilizzati nelle automobili per mantenere la velocità dei veicoli.
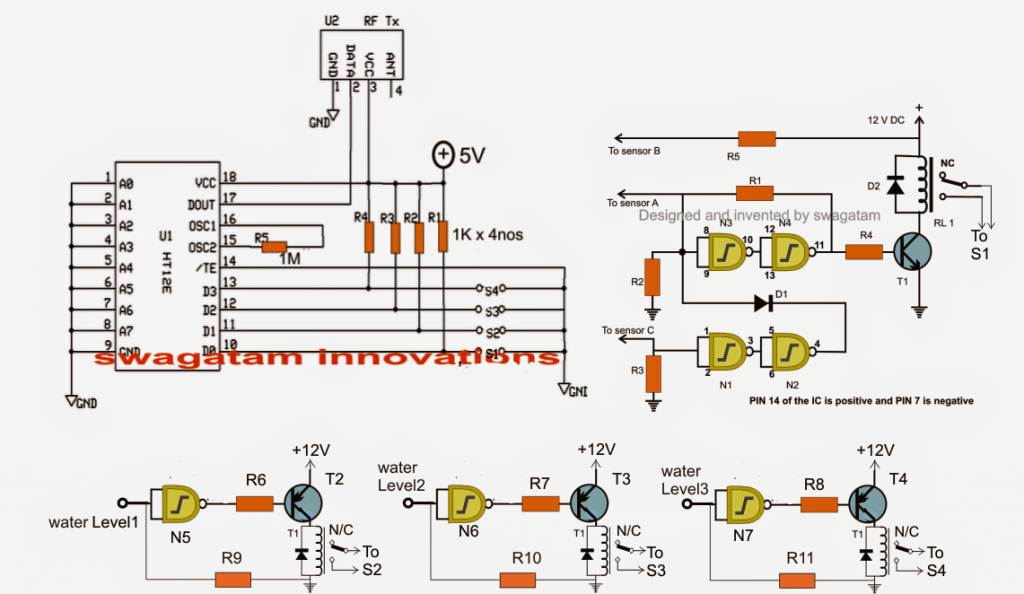
Circuito di applicazione del servomotore
Dal seguente circuito applicativo: Ogni motore ha tre ingressi: VCC, terra e un segnale a onda quadra periodica. L'ampiezza dell'impulso dell'onda quadra determina la velocità e la direzione dei servomotori. Nel nostro caso, dobbiamo solo cambiare la direzione per consentire al dispositivo di spostarsi in avanti, indietro e girare a sinistra ea destra. Se l'ampiezza dell'impulso è inferiore a un determinato intervallo di tempo, il motore si sposterà in senso orario. Se l'ampiezza dell'impulso supera tale periodo di tempo, il motore si muoverà in senso antiorario. L'intervallo di tempo intermedio può essere regolato tramite un potenziometro incorporato all'interno del motore.

3 differenze tra motore passo-passo e servomotore:
- I motori passo-passo hanno un gran numero di poli, coppie magnetiche generate da un magnete permanente o una corrente elettrica. I servomotori hanno pochissimi poli, ogni polo offre un punto di arresto naturale per l'albero motore.
- La coppia di un motore passo-passo a basse velocità è maggiore di un servomotore della stessa dimensione.
- Il funzionamento del motore passo-passo è sincronizzato dai segnali di impulso di comando emessi dal generatore di impulsi. Al contrario, il funzionamento del servomotore è in ritardo rispetto agli impulsi di comando.
Ora hai un'idea del funzionamento del servometro se hai domande su questo argomento o sui progetti elettrici ed elettronici lascia i commenti qui sotto.
Diritti d'autore della foto
- Servomotore di Wikimedia








{kind=link}