Il post discute un circuito di azionamento a frequenza variabile monofase o un circuito VFD per il controllo della velocità del motore CA senza influire sulle specifiche operative.
Cos'è un VFD
I motori e altri carichi induttivi simili specificatamente non 'amano' il funzionamento con frequenze che potrebbero non rientrare nelle specifiche di produzione e tendono a diventare molto inefficienti se costretti a tali condizioni anormali.
Ad esempio, un motore specificato per funzionare con 60 Hz potrebbe non essere consigliato per funzionare con frequenze di 50 Hz o altri intervalli.
Ciò può produrre risultati indesiderati come il riscaldamento del motore, velocità inferiori o superiori alle velocità richieste e consumi anormalmente elevati, rendendo le cose molto inefficienti e riducendo la durata del dispositivo collegato.
Tuttavia, il funzionamento dei motori in condizioni di frequenza di ingresso diverse diventa spesso una costrizione e in tali situazioni un VFD o un circuito di azionamento a frequenza variabile può diventare molto utile.
Un VFD è un dispositivo che consente all'utente di controllare la velocità di un motore CA regolando la frequenza e la tensione dell'alimentazione di ingresso secondo le specifiche del motore.
Ciò significa anche che un VFD ci consente di azionare qualsiasi motore CA attraverso qualsiasi alimentazione CA di rete disponibile indipendentemente dalle sue specifiche di tensione e frequenza, personalizzando opportunamente la frequenza e la tensione del VFD secondo le specifiche del motore.
Ciò viene normalmente fatto utilizzando il controllo fornito sotto forma di una manopola variabile scalata con una diversa calibrazione della frequenza.
Fare un VFD a casa può sembrare una proposta difficile, tuttavia uno sguardo al design suggerito di seguito mostra che dopotutto non è così difficile costruire questo dispositivo molto utile (progettato da me).
Funzionamento del circuito
Il circuito può essere fondamentalmente suddiviso in due fasi: lo stadio del driver half brige e lo stadio del generatore logico PWM.
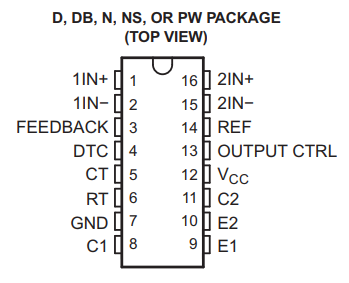
Lo stadio driver half bridge utilizza il driver half bridge IC IR2110 che si occupa da solo dello stadio di azionamento del motore ad alta tensione incorporando rispettivamente due mosfet high side e low side.
Il driver IC costituisce quindi il cuore del circuito ma richiede solo pochi componenti per implementare questa funzione cruciale.
Il CI di cui sopra tuttavia richiederebbe una logica alta e una logica bassa nelle frequenze per pilotare il carico collegato alla frequenza specifica desiderata.
Questi segnali logici di ingresso hi e lo diventano i dati operativi per il driver IC e devono includere segnali per determinare la frequenza specificata e PWM in fase con la rete CA.
Le informazioni di cui sopra sono create da un altro stadio che comprende un paio di 555 circuiti integrati e un contatore di dieci anni. IC 4017.
I due circuiti integrati 555 sono responsabili della generazione dei PWM a onda sinusoidale modificata corrispondenti al campione CA a onda intera derivato da un'uscita del raddrizzatore a ponte ridotto.
L'IC4017 funziona come un generatore logico di uscita totem pole la cui frequenza di alternanza diventa il parametro di determinazione della frequenza PRINCIPALE del circuito.
Questa frequenza determinante viene prelevata dal pin # 3 di IC1 che alimenta anche il pin di attivazione di IC2 e per creare i PWM modificati al pin # 3 di IC2.
I PWM a onda sinusoidale modificati vengono scansionati sulle uscite dell'IC 4017 prima di alimentare l'IR2110 per sovrapporre la 'stampa' esatta dei PWM modificati all'uscita del driver a semiponte e infine per il motore che viene azionato.
Cx e il potenziometro 180k devono essere selezionati o regolati in modo appropriato per fornire la corretta frequenza specificata per il motore.
Anche l'alta tensione allo scarico del mosfet high side deve essere opportunamente calcolata e derivata rettificando la tensione di rete disponibile AC dopo averla opportunamente aumentata o abbassata come da specifiche del motore.
Le impostazioni di cui sopra determineranno i volt corretti per Hertz (V / Hz) per il particolare motore.
La tensione di alimentazione per entrambi gli stadi può essere realizzata in una linea comune, lo stesso per il collegamento a terra.
TR1 è un trasformatore 0-12V / 100mA ridotto che fornisce ai circuiti le tensioni di alimentazione operative richieste.
Il circuito del controller PWM

Dovrai integrare le uscite dell'IC 4017 dallo schema sopra agli ingressi HIN e LIN dello schema seguente, in modo appropriato. Inoltre, collegare i diodi 1N4148 indicati nello schema sopra con le porte MOSFET lato basso come mostrato nello schema sotto.
Il driver del motore a ponte completo

Aggiornare:

Il semplice design VFD singolo sopra discusso può essere ulteriormente semplificato e migliorato utilizzando un IC IRS2453 a ponte pieno auto oscillante, come mostrato di seguito:
Qui l'IC 4017 è completamente eliminato poiché il driver a ponte ful è dotato di un proprio stadio oscillatore, e quindi non è richiesto alcun trigger esterno per questo IC.
Essendo un progetto a ponte completo, il controllo di uscita al motore ha una gamma completa di regolazione della velocità da zero a massima.
Il potenziometro al pin # 5 di IC 2 può essere utilizzato per controllare la velocità e la coppia del motore tramite il metodo PWM.
Per il controllo della velocità V / Hz, Rt / Ct associati all'IRS2453 e R1 associati a IC1 possono essere rispettivamente modificati (manualmente) per ottenere risultati appropriati.
Semplificare ancora di più

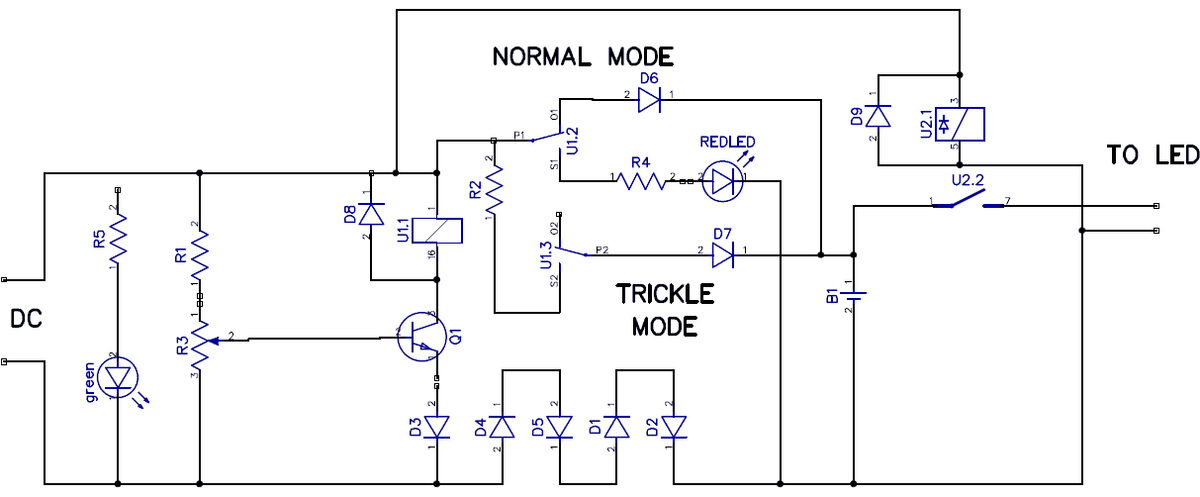
Se ritieni che la sezione del ponte completo sia opprimente, puoi sostituirla con un circuito a ponte completo basato su P, N-MOSFET come mostrato di seguito. Questo driver a frequenza variabile utilizza lo stesso concetto tranne la sezione driver full bridge che impiega MOSFET a canale P sul lato alto e MOSFET a canale N sul lato basso.
Sebbene la configurazione possa sembrare inefficiente a causa del coinvolgimento dei MOSFET a canale P (a causa del loro elevato rating RDSon), l'uso di molti P-MOSFET paralleli potrebbe sembrare un approccio efficace per risolvere il problema del basso RDSon.
Qui 3 MOSFET vengono utilizzati in parallelo per i dispositivi a canale P per garantire un riscaldamento minimo dei dispositivi, alla pari con le controparti a canale N.
Precedente: Come proteggere i MOSFET - Spiegazione delle nozioni di base Avanti: Circuito tracker I / V per applicazioni Solar MPPT