
Di solito, i robot di controllo remoto utilizzano circuiti RF, che hanno gli svantaggi di un raggio di lavoro limitato, controllo limitato e intervallo di frequenza limitato. Per superare questi inconvenienti, land rover azionato da telefono cellulare viene utilizzato un veicolo robotico. Offre i vantaggi del controllo robotico, dei controller antintrusione e fino a dodici sistemi di controllo, ecc.
Sebbene le capacità e l'aspetto di robotica incorporata variano notevolmente, tutti i robot condividono le caratteristiche di una struttura meccanica mobile sotto una qualche forma di controllo. Il controllo dei robot prevede tre fasi differenti: percezione, elaborazione e azione. Normalmente, i sensori sono montati sul robot. La percezione e l'elaborazione viene eseguita dal microcontrollore di bordo e l'azione viene eseguita utilizzando i motori.
Veicolo robotico Land Rover azionato da telefono cellulare

Veicolo robotico Land Rover con telefono cellulare di Edgefxkits.com
L'intenzione principale di questo progetto è controllare un braccio robotico montato su un veicolo robotico utilizzando un telefono cellulare. Fornisce un ampio raggio di azione e un controllo robusto, ecc.
Schema a blocchi del veicolo robotico Land Rover azionato da telefono cellulare:

Schema a blocchi di Land Rover con telefono cellulare
I principali elementi costitutivi sono microcontrollore, cellulare, decodificatore DTMF e circuito di pilotaggio del motore CC. Il cellulare è la parte più importante dell'intero sistema perché l'intero sistema funziona e viene attivato dal cellulare. DTMF (dual tone multi frequency) riceve il segnale in ingresso dal telefono cellulare e lo decodifica, quindi genera un'uscita digitale a 4 bit di Microcontrollore 8051 . Quando il decoder DTMF fornisce un'uscita digitale, genera anche un interrupt ogni volta.
Il microcontrollore è il cuore dell'intero sistema poiché esegue tutte le azioni di controllo. Il microcontrollore dipende dal codice generato dal decodificatore DTMF per spostare il rover a destra o sinistra e avanti o indietro ruotando entrambi i motori CC. Il driver del motore DC riceve segnali di attivazione dal microcontrollore in termini di logica bassa o alta, quindi amplifica e ruota due motori in entrambe le direzioni.
Il controllo del robot prevede principalmente quattro fasi differenti: percezione, elaborazione dell'azione e rilevamento. Nella fase di percezione, se il cellulare collegato al robot riceve una chiamata, l'azione di pressione del tasto sul cellulare decodifica il tono DTMF generato. Quindi, il chip del decodificatore riceve il segnale audio dal cellulare, quindi converte il tono DTMF in un codice binario, che viene quindi inviato al microcontrollore. In questo progetto, un IC MT88710 viene utilizzato come decoder DTMF. Nella fase di elaborazione, il microcontrollore elabora il codice binario che viene ricevuto dal decoder DTMF. Il Il microcontrollore è preprogrammato in 'C' per eseguire questa particolare operazione in base ai bit di input.
Nella fase di azione, la rotazione dei motori dipende dall'input fornito dal microcontrollore. Per il land rover vengono utilizzati due motori CC da 30 giri ciascuno ciascuno e sono azionati dall'IC del driver del motore. Al rilevamento del palco, e per il rilevamento ostacoli, un trasmettitore e ricevitore a infrarossi vengono utilizzati insieme al cicalino. Quando l'ostacolo si trova davanti al robot, il trasmettitore IR trasmette i raggi IR sull'oggetto, quindi l'oggetto riflette i raggi IR al ricevitore IR. Il ricevitore IR riceve quindi i raggi IR per attivare il cicalino.
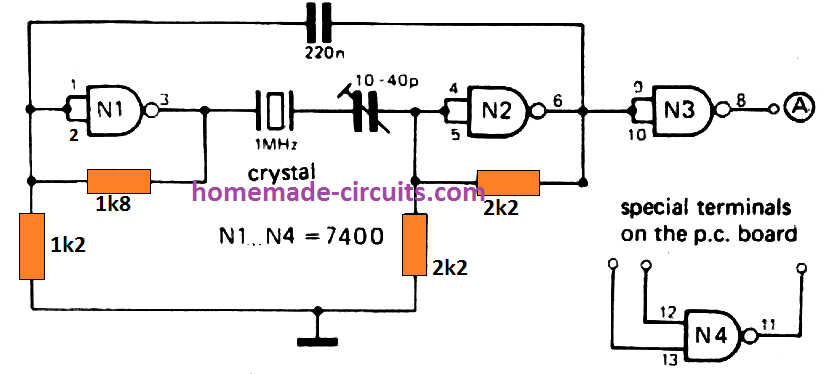
Schema del circuito del veicolo robotico land rover azionato da telefono cellulare:
I componenti principali di questo landrover robotico azionato da cellulare sono il microcontrollore, il driver del motore e il decoder DTMF. In questo progetto viene utilizzato un decodificatore DTMF della serie MT8870 che utilizza tecniche di conteggio digitale per rilevare le 16 coppie di toni DTMF in un'uscita di codice a 4 bit. Il circuito dialtone incorporato elimina il prefiltro. Se viene fornito un segnale di ingresso al pin2, la configurazione di ingresso viene riconosciuta come effettiva. Il segnale di decodifica a 4 bit del tono DTMF viene trasferito al pin11 attraverso l'uscita del pin 14. Questi pin sono collegati ai pin del microcontrollore Pao, Pa1, Pa2 e Pa3. L'uscita del microcontrollore dai pin della porta da PD0 a PD3 e PD7 viene alimentata agli ingressi IN1, IN4 e abilita i pin EN1, EN2 dell'IC del driver motore L293D a azionare i due motori CC .

Schema del circuito di Land Rover con telefono cellulare
In questo circuito, l'interruttore S1 viene utilizzato per il ripristino manuale. L'uscita del microcontrollore non è sufficiente per pilotare i motori CC, quindi i driver di corrente sono necessari per la rotazione del motore.Il driver del motore L293D è progettato per fornire correnti di pilotaggio bidirezionali fino a 600 mA a tensioni da 4,5V a 36V, il che lo rende più facile pilotare i motori DC. Il driver del motore L293D è composto da quattro driver. I pin da IN1 a IN4 e OUT1 e OUT4 sono i pin di ingresso e uscita del driver da 1 a driver 4. I driver 1,2,3 e 4 sono abilitati dal pin di abilitazione1 (EN1) e dal pin 9 (EN2). Quando l'ingresso di abilitazione EN1 (pin1) è alto, i driver 1 e 2 sono abilitati. Allo stesso modo, l'ingresso di abilitazione EN2 (pin9) abilita i driver 3.
Vantaggi e svantaggi:
I vantaggi del landrover robotico azionato da cellulare includono il sistema di provisioning e sorveglianza di controllo wireless, navigazione per veicoli basata sulla tecnologia 3G e raggio operativo illimitato basato sulla rete del cellulare. Lo svantaggio include: il costo in quanto la fatturazione del cellulare è alta scarica delle batterie mobili : il problema di scarica associato alle batterie in quanto le batterie si perdono di carica per scarica rapida perché il carico è ad alta adattabilità: il sistema non è adattabile a tutti i cellulari, ma possono essere utilizzati solo quelli con la cuffia attaccata.
Pertanto, questo progetto di robot azionato da cellulare è molto utile nelle applicazioni militari per controllare i veicoli militari utilizzando un telefono cellulare. In futuro, possiamo rilevare la posizione dei nemici disponendo un file fotocamera wireless al veicolo robotico land rover. Questo progetto può anche essere utile agli accademici poiché gli studenti possono apprendere varie terminologie e principi proposti in questo progetto. Questo progetto aiuterà gli studenti ad aggiungere i loro pensieri e idee innovative sviluppare progetti di robotica .
Crediti fotografici:
- Land Rover con telefono cellulare di santoshbanisetty
- Schema del circuito di Land Rover con telefono cellulare di engineergarage




{kind=link}