
Il termine Robot è stato introdotto per la prima volta da un drammaturgo ceco Karel Capek nel 1920. La parola robot è usata anche per descrivere un dispositivo meccanico intelligente. La robotica è uno dei rami della tecnologia e si occupa di progettazione, creazione, operazioni e applicazioni di robot . La parola robotica deriva dalla parola robot. Ce ne sono principalmente quattro tipi di robot disponibile oggi sul mercato: tipo seriale, tipo mobile, tipo parallelo e tipo a piedi. Gli elementi dei robot sono manipolatori, effettori finali, pinze, alimentazione e controller. Questo articolo elenca i progetti di robotica basati su microcontrollori per studenti di ingegneria.
Cos'è un robot?
Quando pensiamo a un robot, la prima cosa che ci viene in mente è che si tratta di una macchina che imita un essere umano. Ma in termini reali, non esiste una definizione standard per un robot. Tuttavia, ci sono alcune caratteristiche fondamentali che un robot deve avere, ad esempio: rilevamento, movimento, energia e intelligenza. Alcuni robot possono lavorare da soli ed eseguire determinati compiti, mentre altri robot necessitano dell'intervento e dell'aiuto degli esseri umani. I robot sono utilizzati in molte applicazioni come comunicazione mediale, spaziale e applicazioni militari.
La spesa per macchine utensili è cresciuta a passi da gigante nei settori elettronico e automobilistico. Secondo una ricerca del settore, l'India ha speso quasi migliaia di milioni di euro in macchine utensili. Per portare avanti la domanda di sistemi robotici economici, i robot con sede a Bangalore sono attivi e un'azienda ha rilasciato due delle sue robotiche economiche: Artrimus e G4. Artimus è un braccio robotico economico e G4 è un robot Gantry ad alta velocità.

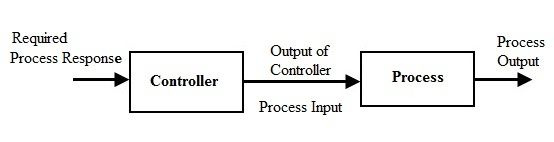
Progetti di robotica utilizzando microcontrollore
Cosa sono i robot industriali?
I robot industriali definiti dall'organizzazione internazionale (ISO) per la standardizzazione sono manipolatori ripetutamente controllati, riprogrammabili e multiuso, e programmabili su molti assi. Questi robot sono progettati per spostare parti, materiali e strumenti e per eseguire una serie di attività nella produzione e nella produzione.
I moderni robot industriali sono vere sensazioni di ingegneria. Questi robot possono trasportare un carico di circa cento libbre e spostarlo molto rapidamente con ripetibilità. Questi robot sono programmabili in molte applicazioni e vengono utilizzati nell'industria automobilistica per applicazioni di assemblaggio, saldatura ad arco e movimentazione dei materiali.

Robot industriali
Progetti di robotica basati su microcontrollori per studenti di ingegneria
Il seguente elenco fornisce progetti di robotica basati su microcontrollori economici, utili per gli studenti. Quindi, i progetti di robotica basati su microcontrollori per studenti di ingegneria includono quanto segue.
Telepresence Robot Virtual
Questo progetto viene utilizzato per progettare un robot di telepresenza. In questo robot, una telecamera è disposta all'interno di un'area remota per catturare l'ambiente circostante in modo visivo con l'aiuto di Raspberry Pi. Queste immagini vengono mostrate sulla realtà virtuale delle cuffie dell'utente.
Una funzionalità aggiuntiva permette alla telecamera di intralciare i movimenti della testa dell'utente per dare un'esperienza immediata all'utente perché se è lì ovunque sia posizionato il robot di un robot di telepresenza virtuale. Questo tipo di robot va comunque in qualsiasi modo utilizzando un'app installata all'interno dello Smartphone dell'utente.
Robot di calcio
Questo progetto viene utilizzato per progettare un robot da calcio. Questo robot può muoversi in diverse direzioni come avanti, destra, retromarcia e sinistra utilizzando un'applicazione Android. Il movimento della velocità del robot può essere controllato attraverso l'angolo di rotazione del telefono. Una volta che lo smartphone viene scosso, questo robot prenderà a calci un pallone.
Robot per la rilevazione di metalli
Questo progetto implementa un robot utilizzando un microcontrollore che viene utilizzato per rilevare i metalli nella corsia di fronte ad esso. Questo tipo di robot è molto utile per rilevare mine terrestri e metalli nel terreno. Questo progetto utilizza la tecnologia RF per controllare il robot.
Robot per la rilevazione umana
Sono disponibili diversi robot di rilevamento umano in base all'applicazione. Ma durante i terremoti, per una squadra di soccorso, è molto difficile rilevare gli esseri umani sotto le costruzioni poiché richiede molto tempo. Per superare questo problema in quelle situazioni, il robot di rilevamento umano viene implementato per rilevare il tempo inappropriato dell'uomo utilizzando un sensore di rilevamento umano. Questo robot di rilevamento umano può essere azionato manualmente tramite la tecnologia RF utilizzando un PC
Indice tattile controllato tramite sensori MEMS
Il tocco aptico viene utilizzato per sentire il mondo tenendo in mano strumenti. Questo progetto implementa un robot rilevato dall'indice utilizzato per i portatori di handicap in modo che possano seguire la direzione dell'indice.
Il percorso del robot può essere continuo altrimenti da punto a punto. Il sensore utilizzato in questo robot rileva principalmente la direzione dell'indice e genera l'output. Questa uscita può essere trasmessa utilizzando il trasmettitore RF verso l'unità ricevitore RF.
Nel ricevitore RF, il ricevitore riceve il segnale per comandare il microcontrollore in modo che il robot possa muoversi in una direzione specifica. Questo sistema utilizza la tecnologia RF, il sensore MEMS e il microcontrollore. Il robot riceve i comandi utilizzando il sensore MEMS. Nella sezione del trasmettitore, questo sensore può essere posizionato sull'indice.
Progettazione di veicoli senza pilota utilizzando microcontrollore
Questo progetto implementa un veicolo senza pilota con l'aiuto di un microcontrollore e una rete GSM. Questo progetto sostituisce il controllo remoto RF utilizzando la rete GSM in quanto presenta diversi svantaggi come la gamma di frequenza è limitata e il controllo limitato.
Implementazione del robot di rilevamento del terreno
Questo progetto progetta un robot utilizzando un microcontrollore, ovvero un robot per il rilevamento del terreno. Questo robot è appositamente progettato per calcolare la regione del terreno e suddividerla in diversi appezzamenti. Questo progetto include due parti come il robot di rilevamento e il modulo di misurazione per l'area. Il controllo di questo robot può essere effettuato utilizzando il modulo ZigBee in modo che il robot possa muoversi nell'intera trama.
Il calcolo della distanza percorsa del robot può essere effettuato utilizzando il concetto di timer. Questo valore di distanza può essere inviato al PC. In questo sistema, la seconda parte coinvolge il modulo di misurazione della regione. Questo modulo può essere progettato con il linguaggio C incorporato per consentire all'utente di decidere in modo efficiente la regione del grafico.
Robot per pittura murale
Il concetto principale di questo progetto è implementare un robot per la pittura murale. Questo robot aiuta a realizzare attrezzature di verniciatura a basso costo. Il motivo principale per progettare questo robot è che le sostanze chimiche nella pittura murale possono causare problemi di salute ai pittori umani come problemi di infezione agli occhi e alla gola.
La pittura a mano richiede molto tempo a causa del lavoro ripetuto. Una volta che i robot e gli operai della costruzione sono stati adeguatamente inclusi nelle attività di costruzione, l'intera procedura di costruzione può essere gestita in modo migliore riducendo la manodopera Inoltre, risolverebbe la maggior parte dei problemi legati alla sicurezza ogni volta che si verificano più attività contemporaneamente.
Robot da parete
La funzione principale di questo robot è progettare e sviluppare un robot per l'arrampicata su parete per pulire un'unica grande finestra. Questo robot si attacca alla superficie del vetro utilizzando un aspirapolvere a ventosa. Questo robot pulisce la finestra utilizzando un tergicristallo collegato al robot sul lato anteriore. Una volta pulita la finestra, il robot smetterà di pulire secondo le istruzioni fornite dal microcontrollore.
Per l'adesione del robot all'esterno, sono disponibili diversi metodi come l'uso della forza magnetica, della micro colonna vertebrale, ecc. Tuttavia, qui sviluppiamo Elecrochuks in questo sistema per ottenere l'adesione del robot. Le dimensioni di questo robot sono di circa 690 mm volte mentre il suo peso è di circa 3 kg inferiore.
Robot 4 in 1 con microcontrollore
Questo progetto implementa un robot quattro in uno basato su microcontrollore che funziona in quattro modalità come il rilevamento del bordo, la linea che segue, il pathfinder e il rilevamento degli ostacoli. Questo progetto può essere costruito con il microcontrollore ATMEGA168 per raggiungere l'obiettivo utilizzando interruttori, sensori e LED.
Strumento ad energia solare che utilizza microcontrollore e braccio robotico
I robot si occupano di macchine automatizzate che possono prendere il posto degli esseri umani implicano semplicemente che assomigliano agli umani. Il braccio di un robot è un tipo di dispositivo meccanico generalmente programmato utilizzando le stesse funzioni di un braccio umano. Sappiamo che l'energia solare è una luce intensa così come il calore generato dal sole. Il sistema proposto viene utilizzato per progettare un robot che può essere alimentato attraverso l'energia solare attraverso le braccia di un robot per raccogliere e posizionare un oggetto.
Nel sistema proposto, è stato progettato principalmente il veicolo robotico alimentato tramite energia solare. Viene utilizzato principalmente per aumentare la potenza dei veicoli che utilizzano l'energia solare. In questo progetto, il braccio robotico è progettato per gestire il veicolo per il prelievo e il posizionamento di un oggetto. La ricarica dei veicoli può essere effettuata utilizzando due metodi come l'utilizzo dell'alimentazione diretta e un altro è il monitoraggio dell'energia solare. Pertanto, l'intera energia solare può essere utilizzata dal robot in modo da poter eseguire l'operazione richiesta.
Analisi e controllo di robot mobili per l'ispezione di tubazioni
Questo progetto progetta un robot che viene utilizzato per l'ispezione della tubazione. Questo robot può essere progettato attraverso i sensori. In questo progetto, l'analisi dell'accelerazione e della velocità del metodo a quattro barre viene utilizzata per controllare il robot. Questo robot utilizza il microcontrollo 8051 che include due sezioni come il trasmettitore e il ricevitore.
Il trasmettitore include quattro interruttori per fornire quattro ordini mentre il ricevitore è collegato al GSM per azionare il robot mobile una volta ricevuto il comando, invia il messaggio una volta che il robot rileva un ostacolo. Nel ricevitore, include un sensore IR che funziona tramite GSM per rilevare un ostacolo. Il GSM aiuterà a progettare capacità interattive in modo da ridurre il tempo necessario per trovare il problema.
Sistema di controllo per sedia a rotelle elettrica utilizzando gli occhi
Questo progetto viene utilizzato per implementare un sistema di controllo per una sedia a rotelle elettrica utilizzando gli occhi. Il controllo di questo sistema proposto può essere fatto solo attraverso gli occhi. Quindi, le persone con handicap fisico possono controllare da sole una sedia a rotelle elettrica. Utilizzando questo progetto, il sistema proposto è forte contro i suddetti fattori di potenza. Inoltre, è stato stabilito che questo progetto può essere controllato attraverso gli occhi umani in modo sicuro e accurato.
Servire Robot tramite RFID
Questo progetto progetta un robot di servizio con l'aiuto di RFID. Questo tipo di robot viene utilizzato per migliorare l'efficienza del servizio di cibo ai clienti all'interno di ristoranti, hotel riducendo i tempi di attesa. In questo progetto, l'operazione richiesta può essere eseguita con l'aiuto di un microcontrollore PIC e della tecnologia RFID.
Land Rover azionato da cellulare
Questo progetto implementa un robot land rover in cui il controllo del robot può essere eseguito utilizzando tre diverse fasi come percezione, azione ed elaborazione. In generale, i precettori non sono altro che sensori che sono disposti sul robot e l'elaborazione può essere effettuata tramite il microcontrollore. Il compito può essere svolto con l'ausilio di motori altrimenti attuatori.
Il robot in questo progetto può essere controllato tramite telefono effettuando una chiamata al telefono collegato al veicolo robotico. Al termine dell'elaborazione è possibile udire il tono del cellulare corrispondente a un pulsante. Il robot land rover riconosce questo tono DTMF utilizzando il telefono impilato all'interno del robot
Robot controllato tramite Bluetooth
Questo progetto implementa un robot controllato tramite Bluetooth. Questi robot possono essere azionati attraverso i segnali che vengono trasmessi da un telefono Android insieme alla comunicazione Bluetooth. I componenti principali utilizzati in questo progetto sono microcontrollore, motore a corrente continua e modulo Bluetooth. La connessione tra il sistema e l'utente può essere stabilita tramite il dispositivo Bluetooth ovunque venga utilizzato un microcontrollore per l'elaborazione del segnale. Le applicazioni di questi robot includono veicoli remoti per missioni senza pilota.
Robot controllato tramite Wi-Fi e microcontrollore
Al giorno d'oggi, il WiFi è diventato una parte essenziale della nostra vita quotidiana e diversi dispositivi collegati a Internet aumenteranno a causa dello sviluppo della tecnologia. In questo progetto, il processo di integrazione può essere eseguito utilizzando un sistema embedded oltre che Internet.
Questo robot può essere gestito tramite un sito Web o un computer con l'aiuto del Wi-Fi come il modulo di comunicazione. Questo modulo deve essere utilizzato per impostare una connessione tra l'utente e il robot. I componenti essenziali utilizzati per costruire questo progetto sono microcontrollore, moduli Wi-Fi come ESP8266 e motori DC.
Robot raccoglitore di rifiuti d'acqua che utilizza l'energia solare
Questo progetto implementa un robot innovativo per raccogliere i rifiuti d'acqua utilizzando l'energia solare. L'intenzione principale di questo progetto è pulire i rifiuti che possono essere raccolti sulla superficie dei corpi idrici. Questo progetto aiuta a pulire l'acqua in modo che l'inquinamento possa essere ridotto.
Questo progetto può essere controllato tramite un telecomando RC. Questo progetto utilizza pompe CC per fornire il controllo della direzione e della disposizione del servomotore per la navigazione. Qui vengono implementati due pannelli solari per rendere il robot autosufficiente sull'acqua. Questi pannelli aiutano a caricare la batteria e la raccolta dei rifiuti può essere eseguita utilizzando un calibro di filo.
Sorveglianza della fauna selvatica tramite robot RF
Questo progetto progetta un robot per la sorveglianza della fauna selvatica utilizzando RF. Utilizzando questo progetto, l'operatore non ha bisogno di avvicinarsi agli animali selvatici per riprendere il filmato molto da vicino. Qui, il robot viene utilizzato per osservare la fauna selvatica degli animali utilizzando il sistema di visione notturna utilizzando una telecamera per la visione notturna sul robot. Questo robot può essere controllato in modalità wireless utilizzando un telecomando RF. Il video registrato può essere memorizzato sul PC per guardare gli animali.
Questo sistema utilizza un'unità microcontrollore 8051 per ricevere segnali dal trasmettitore RF per ulteriori processi. Questi segnali possono essere trasmessi al ricevitore RF in modo che il microcontrollore elabori questi dati per azionare i motori. In modo che i veicoli robotici possano essere azionati. Una volta che il microcontrollore riceve il segnale per cambiare la direzione della telecamera, si inoltra al motore per raggiungere l'angolo preferito della telecamera. Pertanto, l'osservazione della fauna selvatica può essere eseguita utilizzando un robot attraverso una telecamera per la visione notturna per ottenere una visione più ravvicinata degli animali utilizzando il telecomando RF.
Alcune idee per progetti di robotica basati su microcontrollori includono quanto segue.
- Braccio robotico Pick-N-Place e il movimento controllato da Android in modalità wireless
- Veicolo robotico a comando vocale con riconoscimento vocale a lunga distanza
- Robot di spionaggio del campo di guerra con videocamera wireless per visione notturna da applicazioni Android
- La decodifica del codice Manchester controlla la direzione dei robot tramite il telecomando della TV
- Robotica di rilevamento e controllo del fuoco
- Controllo del braccio robotico tramite LAN Internet per il funzionamento del paziente
- Robot antincendio gestito in remoto da applicazioni Android
- Robot di spionaggio del campo di guerra con telecamera wireless per visione notturna
- Veicolo robotico antincendio
- Pick-N-Place con una pinza di presa morbida
- Veicolo robotico metal detector
- Veicolo robotico controllato da telefono cellulare
- Veicolo robotico che segue la linea Utilizzo del microcontrollore
- Veicolo robotico a controllo IR
- Veicolo robotico telecomandato basato su touch screen per la gestione dei negozi
- Auto Metro Train to Shuttle tra le stazioni
- Veicolo robotico per evitare gli ostacoli
- Veicolo robotizzato a controllo RF con gestione del raggio laser
Progetti di robotica per studenti di ingegneria
Negli ultimi anni, molti studenti di ingegneria hanno iniziato a mostrare molto interesse per i progetti robotici rispetto ad altri progetti. Robot come pick-and-place, seguire la riga , binari a muro e progetti di robotica che utilizzano microcontrollori sono progetti popolari a livello accademico. Il seguente elenco di progetti di robotica basati su microcontrollore e progetti robotici per studenti di ingegneria è molto utile per gli studenti. Oltre a questo, ci sono alcuni componenti elettronici progetti di ingegneria su applicazioni robotiche.

Progetti di robotica per studenti di ingegneria
- Robot di allarme e rilevamento umano in tempo reale
- Robot controllato da PC wireless
- Robot telecomandato basato su RF con videocamera wireless montata su di esso
- Robot autonomo con visione artificiale per il rilevamento degli ostacoli
- Robot per irrorazione di deodoranti per ambienti wireless con visione video
- Robot Pick and Place semplice
- Robot intelligente controllato da touch screen
- Interfaccia uomo-robot che utilizza un robusto riconoscimento vocale
- Robot Rilevatore Gas GPL e Fumo con Controllo Wireless
- Robot multiuso wireless controllato da PC
- Robot di riconoscimento vocale con un'indicazione del sensore antincendio
- Robot di controllo remoto con sensore antincendio
- Braccio robotico interfacciato con MCU / RF / IR / PC
- Robot spruzzatore di velocità
- Robot di monitoraggio del pannello solare
Progetti di robotica semplici per principianti
Per i principianti, è meglio andare semplici progetti robotici per l'apprendimento di concetti e tecniche di base che li sfideranno ad affrontare una robotica ampia e complessa man mano che si abitueranno a praticarli.

Progetti di robotica semplici
- Robot mobile controllato utilizzando GSM
- Edge Avoider Robot
- Robot che segue la luce
- Un semplice robot che segue la linea
- Robot seguace del muro
- Robot di rilevamento della bomba
- Robot ad energia solare di TRASH
- Robot ubriaco tascabile
- Virbobot scarafaggio solare
- Lampeggia il LED Pet
- Modello di carta robot intrattabile
Progetti di robot Arduino
Arduino è un microcontrollore a scheda singola e il suo hardware è costituito da una scheda hardware open source. Questa scheda hardware è progettata utilizzando un Atmel a 8 bit Microcontrollore AVR o un ARM Atmel a 32 bit. Arduino è progettato per fornire un modo semplice per programmare oggetti interattivi. Qui abbiamo menzionato un elenco di progetti di robotica basati su microcontrollori come un Arduino.

Progetti di robot Arduino
- Controlla un braccio robotico OWI con Arduino
- DFRobotshop Rover o Arduino su tracce
- Robot Arduino a controllo vocale
- Microbot basato su Arduino Nano
- Auto RC con ingegneria inversa per realizzare un rover Arduino
- 2WD Extend Platform Arduino Robot Chassis Smart Car Chassis
- Kit telaio per auto intelligente Arduino Robot 4WD con encoder di velocità
- The Hexbug Spider Hack
- Calpesta il robot ambulante
- Arduino Bot Proto
- Robot Arduino per testare Whiley
- Robot autobilanciante a 2 ruote utilizzando Arduino e MPU6050
Progetti di ingegneria elettronica
Nella nostra vita quotidiana, l'elettronica gioca un ruolo importante. Quindi, se impariamo alcune cose di base sull'elettronica, ci è favorevole. Questi progetti elettronici si occupano di vari circuiti che possono includere concetti come condensatori, diodi, circuiti integrati, ecc. Molte persone ora mostrano interesse per vari rami dell'ingegneria dell'elettronica. Dopo aver svolto alcuni progetti nel ramo dell'ingegneria elettronica, possiamo acquisire una conoscenza pratica dell'elettronica. Per coloro che sono interessati a progetti di elettronica, il seguente elenco di progetti e idee di ingegneria elettronica servirebbe utile.
- Domotica basata su Arduino
- Trasferimento di potenza wireless nello spazio 3D
- Controller per pompe per liquidi industriali con intervalli di tempo definiti dall'utente basati su timer
- Controllo automatico dell'intensità dei lampioni basato su Arduino
- Principi del generatore di corrente continua ad alta tensione di Marx
- Sistema di sicurezza elettronico controllato dagli occhi
- Lungo raggio Trasmettitore fm con modulazione audio
- Carico azionato da relè basato su ritardo
- Aumenta da 6 V CC a 10 V CC utilizzando il timer 555
- Controllo sequenza fasi per alimentazione trifase
- Rilevatore di fumo o fuoco con sistema automatico di irrigazione dell'acqua
- Sistema di accensione e spegnimento basato su GSM / GPRS
- Sistema IVRS controllato da telefono cellulare
- Sistema di controllo automatico dell'illuminazione stradale utilizzando High Sensitivity LDR
- Regolazione automatica della velocità a seconda del veicolo in arrivo su strade alte
- Applicazioni dei robot
- Le applicazioni robotiche possono essere classificate in due tipi: applicazioni attuali e applicazioni future.
- Le applicazioni attuali includono:
- Trasferimento materiale, carico e scarico macchina
- Operazioni di elaborazione
- Assemblaggio e ispezione
- Le applicazioni future includono:
- Medico
- Militare -artiglieria, carico, sorveglianza
- Applicazioni domestiche
- Industria elettronica
- Officina meccanica completamente automatizzata
Riguarda l'elenco dei progetti sulla robotica come progetti robotici basati su microcontrollori economici, progetti robotici semplici, progetti robotici Arduino e progetti robotici per studenti di ingegneria. Ci auguriamo che tu abbia una migliore comprensione e il concetto di progetti di robotica basati su microcontrollori. Per favore condividi le tue opinioni su questo articolo nella sezione commenti qui sotto e per ulteriore aiuto per implementare questi progetti, puoi contattarci.
Crediti fotografici:
- Progetti di robotica utilizzando microcontrollore di daihen-usa
- Robot industriali di linksic
- Progetti di robotica per studenti di ingegneria di electronicshub
- Progetti di robotica semplici di nootrix
- Progetti di robot Arduino di rlocman





{kind=link}