I robot possono essere utilizzati in molte applicazioni nell'industria, militare, domestica. Uno degli usi principali dei robot è una risorsa per gli esseri umani. Che si tratti di qualsiasi tipo di situazione pericolosa come uno scoppio di incendio o un luogo pieno di mine, i robot possono facilmente trovare una via d'uscita a questi problemi. Vediamo quindi questi due tipi di robot: un robot che rileva le mine terrestri e un robot antincendio
Robot di rilevamento delle mine terrestri
Come rilevare la miniera di terra con i robot?
Una delle applicazioni più importanti della robotica è nella difesa. Un robot nell'esercito è un veicolo telecomandato con molte caratteristiche uniche. Può essere un veicolo robotico con una telecamera per spiare, un veicolo robotico con una pistola LASER per rilevare e distruggere i bersagli o un robot con un metal detector rilevare la presenza di mine terrestri.
Uno dei metodi tradizionali e convenzionali di rilevamento delle mine è l'uso di personale addestrato che cerca manualmente metalli o miniere utilizzando un metal detector. Tuttavia, questo è pericoloso, costoso e anche lento.
Per ovviare a questo problema è preferibile un sistema molto più avanzato.
Un paio di modi per rilevare le mine antiuomo:
- Utilizzando un robot in grado di inserire una sonda nel terreno in grado di rilevare gli oggetti sottostanti e determinare il tipo di materiale.
- Utilizzo di un robot con un metal detector in grado di rilevare la presenza di elementi conduttivi come mine terrestri e allarmare l'utente.
Prima di approfondire i dettagli sul secondo tipo, ovvero il robot con un metal detector, ricordiamo brevemente i due termini importanti: Land Mines e Metal Detector.
PER Mina di terra è un ordigno esplosivo posto deliberatamente sotto terra che esplode quando innescato dalla pressione. Secondo un rapporto statistico, ci sono circa 100 milioni di mine in 70 paesi in tutto il mondo. Una volta posizionata, una mina può funzionare fino a 50 anni. Non è pericoloso !!

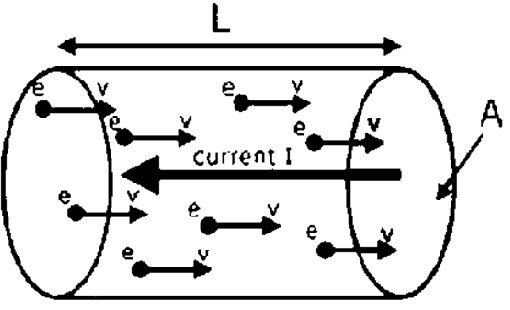
Un metal detector di base funziona secondo il principio della legge di induzione di Faraday. Consiste in una bobina che viene eccitata per sviluppare un campo magnetico pulsante attorno ad essa. Quando la bobina si trova in prossimità di un elemento conduttivo come il metallo (una mina), viene indotta una corrente elettrica (corrente parassita). La corrente parassita indotta provoca lo sviluppo di un campo elettromagnetico attorno al metallo, che viene ritrasmesso alla bobina che sviluppa un segnale elettrico che viene analizzato. Maggiore è la distanza tra la bobina e il metallo, più debole è il campo magnetico.
Un semplice prototipo:

Un semplice prototipo di veicolo robotico con metal detector
Progettare il robot:
Il veicolo robotico è composto dalle seguenti unità:
- Una base rettangolare per sostenere l'intera struttura del robot, fissata con due ruote per il movimento.
- Un paio di motori DC per fornire il movimento richiesto al robot.
- Un'unità di controllo costituita da un ricevitore RF che riceve segnali di comando da un'unità trasmittente per controllare il driver del motore e controllare i motori di conseguenza.
- Una volta rilevato il metallo, viene attivato un circuito metal detector insieme a un cicalino di allarme.
Come funziona il robot:
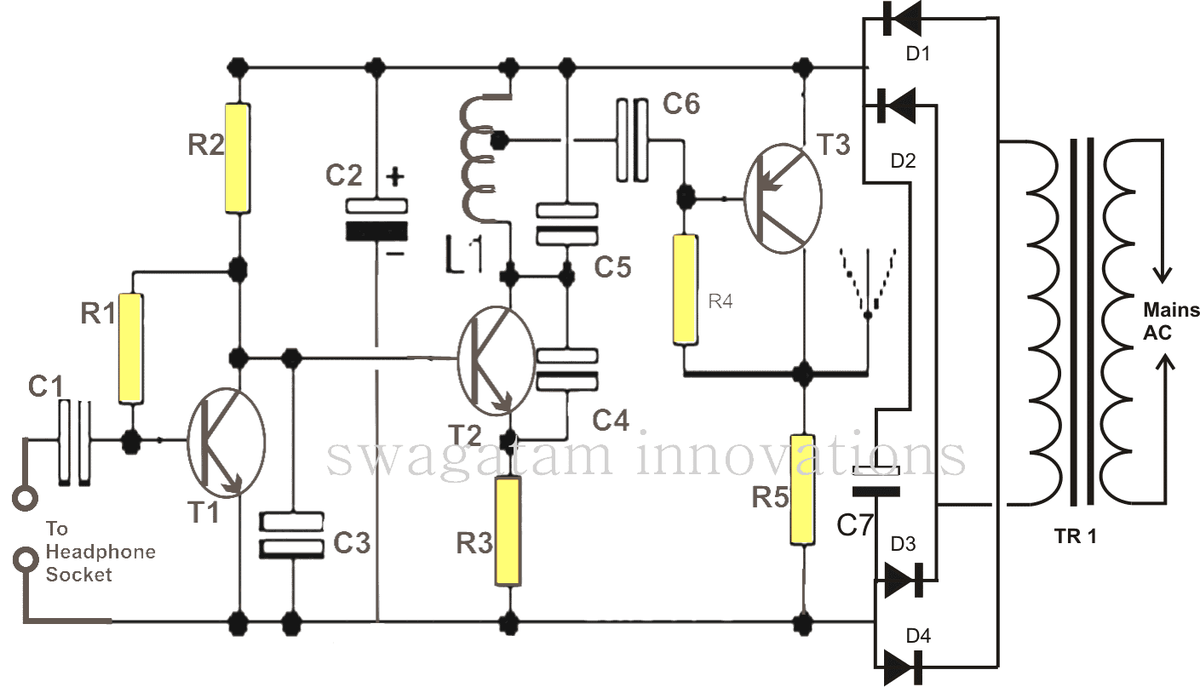
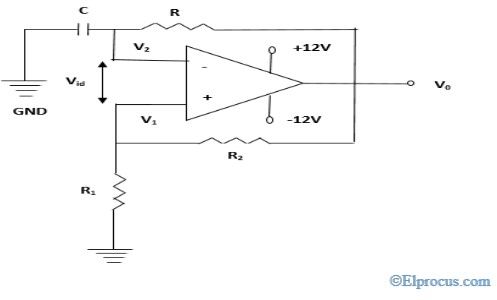
Il circuito del rivelatore di metalli incorporato nel circuito di controllo del robot è costituito da un transistor che è pilotato da un circuito oscillatore sintonizzato costituito dalla bobina. Quando viene rilevato un metallo e la corrente elettrica viene ritrasmessa attraverso la bobina, il transistor1 è in condizione on e porta un altro transistor2 in condizione off. Questo transistor3, a sua volta, porta un altro transistor in condizione di spegnimento. Questo particolare transistore 3 è collegato ad un altro transistore4 che è collegato in modo tale da essere acceso quando il suo transistore di pilotaggio 3 è spento. Il transistore 4 è collegato in modo tale che, in condizione ON, il buzzer e il LED ricevano una corretta polarizzazione e iniziano a condurre.

Schema a blocchi dell'unità metal detector
Il LED si accende e il cicalino inizia a suonare. Pertanto, quando viene rilevato un metallo, l'allarme acustico inizierà a suonare e il LED si accenderà.
Controllo del robot:
Il semplice prototipo può essere controllato utilizzando la comunicazione RF, che è un sistema di comunicazione a corto raggio. I comandi vengono trasmessi utilizzando un trasmettitore e ricevuti da un ricevitore incorporato nel circuito del robot per controllare il movimento del robot.

Diagramma a blocchi della sezione del trasmettitore
Il trasmettitore è costituito da una serie di pulsanti come avanti, indietro, stop, sinistra e destra che vengono premuti per fornire il movimento del robot in qualsiasi direzione desiderata. I pulsanti sono collegati alla porta di ingresso del microcontrollore. Il microcontrollore alla ricezione di questi segnali sviluppa un corrispondente segnale a 4 bit in forma parallela attraverso un'altra porta di I / O, a cui è collegato un IC codificatore. L'encoder converte questi segnali in una forma seriale di dati. Il trasmettitore RF modula questi dati seriali, che vengono trasmessi attraverso l'antenna.

Diagramma a blocchi della sezione del ricevitore
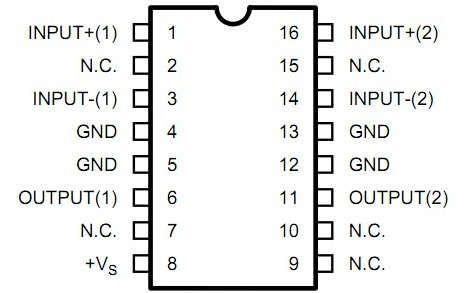
La sezione ricevitore montata sul robot è costituita dal ricevitore RF che demodula questo segnale. Il decoder IC riceve questo segnale in forma seriale e sviluppa un corrispondente dato parallelo a 4 bit alla sua uscita. Il microcontrollore riceve questi dati e di conseguenza fornisce un segnale di controllo al driver del motore IC LM293D, che aziona entrambi i motori.
Veicolo robotico antincendio:
Il concetto di veicolo robotico antincendio sta combattendo in un incendio. Negli ultimi anni si sono verificati diversi incidenti gravi, inclusi incendi e esplosioni di bombe. Siamo stati a conoscenza di gravi incidenti di incendio come centrali nucleari, petrolio, serbatoi di gas e fabbriche chimiche, aziende industriali di incendi su larga scala in questi luoghi una volta che hanno iniziato l'incendio, possono risultare molto gravi. Migliaia di persone sono morte in questo incidente. Questa è una lotta antincendio veicolo robotico tecnologia. Questo veicolo robotico era utilizzato per trovare il fuoco e combattere per gli incendi.

Veicolo robotico antincendio
Principio di funzionamento del veicolo robotico antincendio:
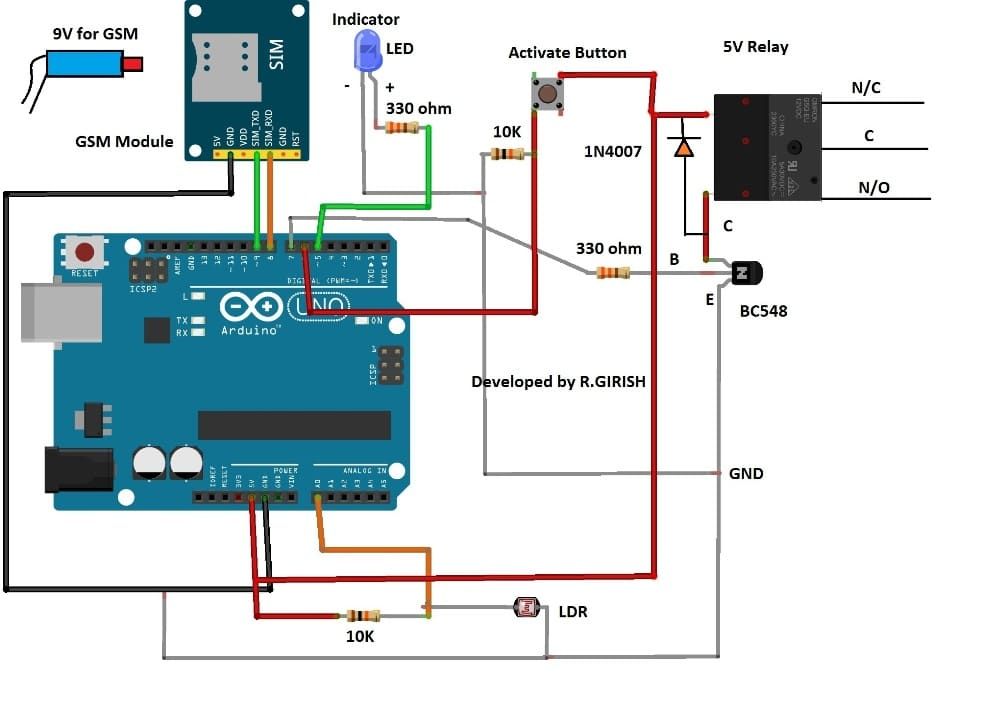
Il veicolo robotico caricato con una cisterna d'acqua. La pompa è controllata dalla comunicazione wireless (RF e comunicazione mobile). L'estremità del trasmettitore è collegata ai pulsanti. Usando questo pulsante i comandi vengono inviati al ricevitore e controllano il momento del robot in avanti, indietro, sinistra, destra. I tre motori dell'estremità ricevente sono collegati al microcontrollore.

Diagramma a blocchi del trasmettitore

Diagramma a blocchi del ricevitore
Il trasmettitore RF funge da telecomando RF dove la portata è di 200 metri. In casa, negli uffici e nelle industrie, i sensori antincendio vengono tenuti in determinati luoghi quando si verifica un incendio vicino a un sensore antincendio. I sensori rilevano che il bit corrispondente viene trasmesso al ricevitore RF. Il ricevitore RF è integrato con un microcontrollore. Quando il ricevitore RF riceve i segnali che le informazioni stanno passando al microcontrollore, il robot si sta muovendo verso i sensori di fuoco. Le posizioni dei sensori sono memorizzate nel microcontrollore. Una volta che il robot raggiunge la posizione desiderata, il robot si ferma e attiva lo spruzzatore per quel fuoco. Dopo aver sparato, il robot si porta nella posizione iniziale. L'intero circuito è controllato dal microcontrollore.
Tipi di veicoli robotici antincendio:
Veicolo robotico antincendio domestico :
L'azione sul campo è vincolata sull'attuale Flore di casa. Questo robot usa molti oggetti domestici per prendere fuoco quando qualcuno dorme o è assente. Questo robot viene utilizzato per mettere in sicurezza la casa e utilizzando questa applicazione tutte le porte vengono aperte in Flore perché questo veicolo si sta spostando da un posto all'altro della casa. L'area antincendio deve essere sicura per non causare un nuovo incidente. La caratteristica aggiuntiva di questo robot è quella di operare a lunga distanza.
Antincendio industriale:
La maggior parte delle industrie devono affrontare problemi di incidenti come gas, benzina, centrali nucleari, industrie chimiche, enormi quantità di danni e un numero maggiore di persone è morto vicino alle aree circostanti. Questo robot ha la forza di trasportare il fuoco all'interno dell'area in fiamme per fornire acqua illimitata. Il fuoco causa visibilità ridotta, calore estremo e molte altre situazioni che possono essere causa di lesioni.
Lotta contro gli incendi boschivi:
Gli incendi boschivi sono molto pericolosi. Può essere un breve periodo di tempo bruciare una grande quantità di area forestale. Anche i vigili del fuoco urbani devono affrontare gli incendi boschivi nell'area circostante la città. Alcuni anni fa circa 152 vigili del fuoco furono uccisi negli anni '90. La robotica degli incendi boschivi sta usando per prendere il fuoco e combattere il fuoco. Questo robot utilizza un dispositivo di controllo esterno per scopi di comunicazione wireless. Il modulo è collegato con la cui estremità di uscita viene utilizzata per l'estinzione degli incendi boschivi del robot. Le applicazioni come sensore di pressione, sensore di temperatura, sensore di smog, sensore a infrarossi, vengono utilizzate per il controllo del robot antincendio boschivo.
Al prompt!
Anche se ho dato un'idea di base del robot con un metal detector, esiste ancora una domanda importante: come guidare il robot su terreni irregolari che sono sconosciuti, specialmente in ambienti soggetti a forti piogge, polvere e temperature elevate. Per trovare una risposta e pubblicare i tuoi commenti.