
Un robot è un agente artificiale meccanico o virtuale, generalmente una macchina elettromeccanica guidata da un programma per computer che utilizza circuiti elettronici . I robot possono essere autonomi o semi-autonomi e vanno da umanoidi come Honda è il passo avanzato nella mobilità innovativa e TOSY. TOSY Ping Pong Playing Robot a robot industriali, robot assistiti da brevetti, robot operativi medici, robot terapia cinofila, robot swarm programmati collettivamente e persino nanorobot microscopici. Rappresentando una vita come un'apparenza o automatizzando i movimenti, un robot può trasferire un senso di intelligenza o da solo. Questo articolo discute i veicoli robotici wireless basati su sensori IR.
Cos'è un veicolo robotico wireless?
Il il robot è una tecnologia che si occupa della progettazione, costruzione, funzionamento e applicazione dei robot, così come dei sistemi informatici, viene utilizzato per il controllo, il feedback sensoriale e l'elaborazione delle informazioni sono chiamati robot. Questa tecnologia si occupa di macchine automatizzate che possono essere collocate dall'uomo in ambienti pericolosi o assomigliare agli esseri umani nell'aspetto e nel comportamento. Al giorno d'oggi i robot sono ispirati dalla natura che contribuisce al campo della robotica bio-ispirata. Questi robot hanno anche creato una nuova branca della robotica e della robotica morbida. Le tecniche meccaniche sviluppate durante l'era industriale, ci sono applicazioni più pratiche come macchine automatiche, telecomando e telecomando wireless.

Veicolo robotico senza fili
Cos'è un sensore IR?
Un Sensore IR è un dispositivo che emette per rilevare alcuni aspetti dell'ambiente circostante che rileva la radiazione IR che cade su di esso. L'emettitore è semplicemente un LED IR ( Diodo ad emissione luminosa ) e il rivelatore è semplicemente un fotodiodo IR sensibile alla luce IR della stessa lunghezza d'onda emessa dal LED IR. Quando la luce IR cade sul fotodiodo, le resistenze e le tensioni di uscita cambiano in proporzione all'ampiezza della luce IR ricevuta. Esistono molti tipi di sensori IR che vengono costruiti e possono essere costruiti a seconda dell'applicazione. Sensori di contrasto (utilizzati in Robot che seguono la linea ), Sensori di prossimità (utilizzati nei telefoni touch screen) e sensori di ostruzione (utilizzati per il conteggio delle merci e negli allarmi antifurto) sono alcuni esempi.

Sensore IR
Robot wireless telecomandato a radiofrequenza
Il veicolo robotico wireless controllato da RF include principalmente un trasmettitore RF e un ricevitore RF.
Trasmettitore RF
Moduli RF di solito sono di dimensioni molto ridotte e funzionano nella gamma di tensione da 3V a 12V. I moduli trasmettitori RF sono progettati per funzionare solo con una frequenza di 433 MHz. Se si trasmette lo zero logico, il trasmettitore non riceve alimentazione. Per la trasmissione, la logica è una, consuma circa 4,5 mA con 3V. Il trasmettitore e il ricevitore si interfacciavano con il 8051 microcontrollori e ottenere l'operazione desiderata. Il trasmettitore RF ha fornito una tensione compresa tra 3 V e 6 V e una potenza di uscita compresa tra 4 V e 12 V.

Trasmettitore RF
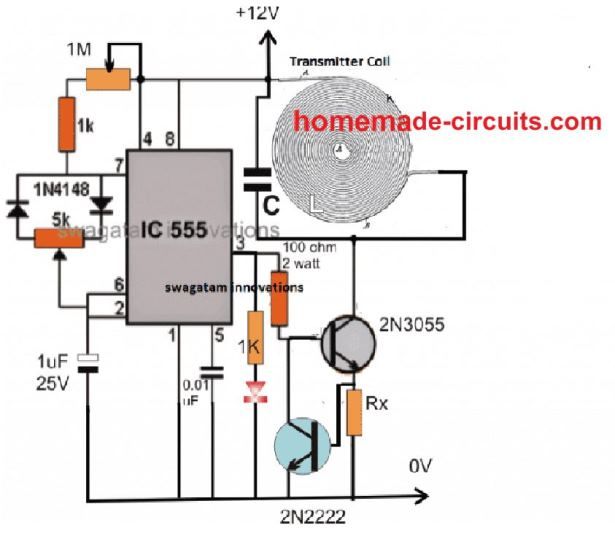
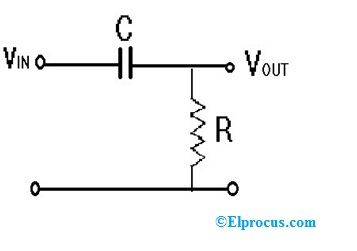
Lo schema del circuito del trasmettitore RF mostrato di seguito viene utilizzato per collegare diversi pulsanti per spostare il veicolo robotico in direzioni diverse come avanti, indietro, destra e sinistra. Pertanto, premendo il pulsante appropriato, possiamo controllare il movimento del veicolo robotico.
Ricevitore RF
Anche il ricevitore RF è di piccole dimensioni e il ricevitore RF ha una corrente di alimentazione di 3,5 mA con una tensione operativa di 5 V. I moduli trasmettitore RF sono progettati per funzionare solo con 433 MHz (che deve corrispondere alla frequenza del trasmettitore per scopi di comunicazione per ricevere segnali dal trasmettitore).

Ricevitore RF
Comunicazione RF utilizzando il veicolo robotico
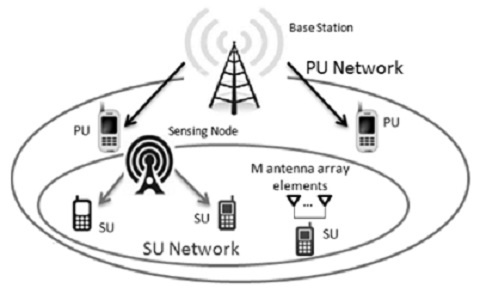
La radiofrequenza (RF) è composta da un trasmettitore e un ricevitore, che è collegato a un circuito isolato che deve essere controllato. Un segnale di controllo viene trasferito dall'estremità del trasmettitore sotto forma di onde radio o onde elettromagnetiche, in modo tale da controllare il dispositivo a distanza, che è collegato all'estremità del ricevitore. Questo segnale di controllo viene trasmesso utilizzando onde elettromagnetiche o onde radio a radiofrequenza. Pertanto, il segnale di controllo ricevuto all'estremità del ricevitore e ottiene l'uscita accurata come un veicolo robotico, un robot per scopi speciali, un dispositivo per scopi di comunicazione e così via.
Veicolo robotico controllato da RF
L'obiettivo principale di questo progetto è progettare un veicolo robotico controllato da un telecomando TV. Qui, il sistema proposto utilizza Tecnologia RF per il funzionamento a distanza. Un sensore IR è interfacciato all'unità di controllo del robot per rilevare i segnali infrarossi che vengono trasmessi dal telecomando. Per l'operazione preferita viene utilizzata una serie 8051 del microcontrollore.
Nella sezione di trasmissione (TX), i pulsanti vengono utilizzati per inviare i comandi all'estremità del ricevitore per controllare il movimento del robot, per spostarsi in quattro direzioni come avanti, destra, indietro e sinistra, ecc. Nella sezione di ricezione, due motori interfacciati con il microcontrollore della famiglia 8051 dove vengono utilizzati per la movimentazione del veicolo.

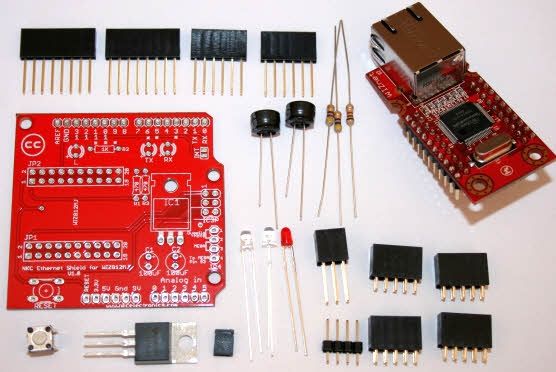
Kit di progetto per veicoli robotici wireless basato su sensore IR
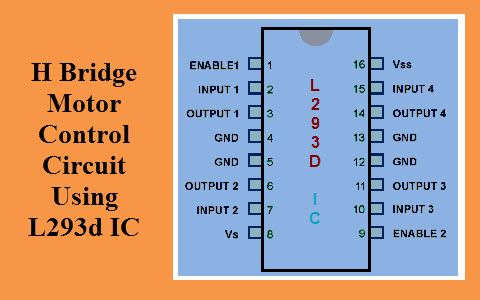
Il telecomando della TV genera dati basati su RC5 che vengono ricevuti da un ricevitore a infrarossi interfacciato con il microcontrollore. Il programma integrato nel microcontrollore fa riferimento al codice per produrre l'output preferito in base ai dati i / p per far funzionare i motori tramite un IC driver del motore.
Il trasmettitore RF funziona come un telecomando RF che ha il vantaggio di un ampio raggio (fino a 200 metri) con un'antenna adatta, mentre il ricevitore decodifica prima di fornirlo ad un altro microcontrollore per azionare motori CC attraverso il driver del motore IC per il lavoro richiesto.
Inoltre, questo progetto può essere migliorato utilizzando Tecnologia DTMF . Utilizzando la tecnologia RF possiamo controllare il robot utilizzando un telefono cellulare. Questa tecnologia ha un vantaggio su un lungo raggio di comunicazione rispetto alla tecnologia RF.
Quindi, si tratta di veicoli robotici wireless basati su sensori IR. Ci auguriamo che tu abbia una migliore comprensione di questo concetto. Inoltre, eventuali dubbi in merito a questo concetto o progetti elettrici ed elettronici , per favore dai il tuo feedback nella sezione commenti qui sotto. Ecco una domanda per te, qual è la funzione principale del sensore IR?




![Circuiti caricabatterie da 12 V [utilizzando LM317, LM338, L200, transistor]](https://electronics.jf-parede.pt/img/battery-chargers/11/12v-battery-charger-circuits-using-lm317.png)