Un robot pick and place è quello utilizzato per raccogliere un oggetto e posizionarlo nella posizione desiderata. Può essere un robot cilindrico che fornisce il movimento sugli assi orizzontale, verticale e rotazionale, un robot sferico che fornisce due movimenti rotatori e uno lineare, un robot articolato o un robot scara (robot fissi con bracci rotanti a 3 assi verticali).
Vantaggi
Prima di proseguire, vediamo alcuni motivi per cui i robot pick and place sono preferiti:
- Sono più veloci e possono portare a termine il lavoro in pochi secondi rispetto alle loro controparti umane.
- Sono flessibili e hanno il design appropriato.
- Sono accurati.
- Aumentano la sicurezza dell'ambiente di lavoro e in realtà non si stancano mai.
Parti di un robot Pick N Place

Scegli N Place Robot
Vediamo in cosa consiste effettivamente il robot pick and place:
- A Rover : È il corpo principale del robot costituito da diversi corpi rigidi come un cilindro o una sfera, giunti e collegamenti. È anche noto come manipolatore.
- End Effector : È il corpo collegato all'ultimo giunto del rover che viene utilizzato allo scopo di afferrare o manipolare oggetti. Può essere un'analogia con il braccio di un essere umano.
- Attuatori : Sono i driver del robot. In realtà attiva il robot. Può essere qualsiasi motore come servomotore, motore passo-passo o cilindri pneumatici o idraulici.
- Sensori: Sono utilizzati per rilevare lo stato interno ed esterno per assicurarsi che il robot funzioni senza problemi nel suo complesso. I sensori coinvolgono sensori tattili, sensori IR ecc.
- Controller : Viene utilizzato per controllare gli attuatori in base al feedback del sensore e quindi controllare il movimento di ogni singolo giunto ed eventualmente il movimento dell'end effector.
Funzionamento di un robot Pick N Place di base:
La funzione di base di a scegli e posiziona il robot è fatto dalle sue articolazioni. Le articolazioni sono analoghe alle articolazioni umane e vengono utilizzate per unire i due corpi rigidi consecutivi nel robot. Possono essere giunto rotante o giunto lineare. Per aggiungere un'articolazione a qualsiasi collegamento di un robot, dobbiamo conoscere i gradi di libertà e i gradi di movimento per quella parte del corpo. I gradi di libertà implementano il movimento lineare e rotatorio del corpo e i gradi di movimento implicano il numero di assi che il corpo può muovere.

Un semplice robot Pick N Place
Un semplice robot pick and place è costituito da due corpi rigidi su una base mobile, collegati tra loro tramite giunto rotante. Un giunto rotante è quello che fornisce una rotazione di 360 gradi attorno a uno qualsiasi degli assi.
- Il fondo o la base è fissato con ruote che assicurano un movimento lineare.
- Il 1stil corpo rigido è fisso e supporta il secondo corpo rigido al quale è previsto l'effettore finale.
- Il 2ndIl corpo rigido è dotato di movimento su tutti e 3 gli assi e dispone di 3 gradi di libertà. È collegato a 1stcorpo con un giunto rotazionale.
- L'end effector dovrebbe accogliere tutti i 6 gradi di libertà, al fine di raggiungere tutti i lati del componente, per prendere posizione a qualsiasi altezza.
Nel complesso, il robot pick and place di base funziona come segue:
- Le ruote sotto la base aiutano a spostare il robot nella posizione desiderata.
- Il corpo rigido che sostiene l'effettore finale si piega o si raddrizza per raggiungere la posizione in cui è posizionato l'oggetto.
- L'end effector raccoglie l'oggetto con una forte presa e lo posiziona nella posizione desiderata.
Ora che abbiamo una breve idea del robot pick and place, la domanda di base è come viene effettivamente controllato.
Un semplice robot pick and place può essere controllato controllando il movimento del suo end effector. Il movimento può essere utilizzando il movimento idraulico, cioè utilizzando fluido idraulico sotto pressione per azionare il robot, o utilizzando il movimento pneumatico, cioè utilizzando aria pressurizzata per provocare il movimento meccanico. Tuttavia, il modo più efficace è utilizzare i motori per fornire il movimento richiesto. I motori devono essere controllati al fine di fornire il movimento richiesto al robot e all'effettore finale.
Esempio di funzionamento del controllo di un robot Pick N Place
Che ne dici di controllare il robot con pochi pulsanti sulla tastiera? Sì, è possibile! Premendo semplicemente il pulsante richiesto, possiamo trasmettere il comando al robot per farlo muovere in qualsiasi direzione per portare a termine il nostro compito. Inoltre, ciò può essere ottenuto utilizzando una semplice comunicazione wireless.
Vediamo come funziona effettivamente:
La parte trasmittente è costituita dalla tastiera interfacciata al microcontrollore. Qualsiasi numero di pulsante in formato decimale viene convertito in binario a 4 cifre dal microcontrollore e l'uscita parallela su una delle sue porte viene applicata all'encoder. L'encoder converte questi dati paralleli in dati seriali e questi vengono inviati al trasmettitore, dotato di un'antenna per trasmettere i dati seriali.

Diagramma a blocchi che mostra il trasmettitore di un robot Pick N Place
Il lato ricevitore è costituito da un decoder interfacciato al microcontrollore. Il decoder converte il comando ricevuto in formato seriale in formato parallelo e fornisce questi dati al microcontrollore. In base a questo comando il microcontrollore invia i segnali di ingresso appropriati ai driver del motore per azionare i rispettivi motori.

Diagramma a blocchi che mostra il ricevitore di un robot Pick N Place
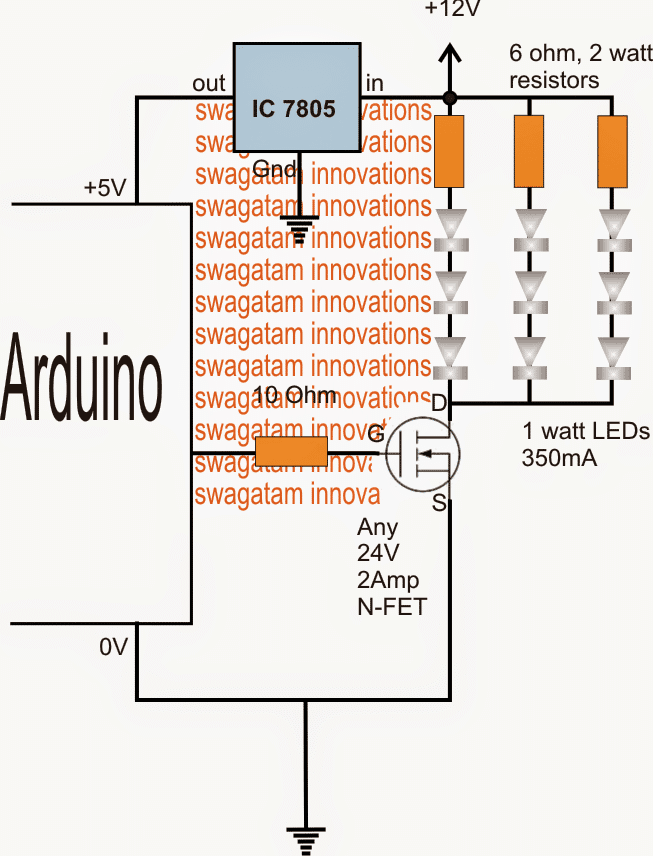
Il sistema è composto da due motori per fornire movimento all'intero robot e altri due motori per fornire il movimento del braccio. L'effettore finale o la pinza devono essere controllati per applicare la giusta pressione sull'oggetto per maneggiarlo efficacemente, per dargli una impugnatura morbida . Ciò è garantito controllando i motori del braccio tramite un comando appropriato. L'uscita dai motori del braccio è collegata a una resistenza da 10 Ohm / 2 W e al momento del sovraccarico del motore o della condizione di blocco, viene sviluppata un'alta tensione attraverso la resistenza, che provoca un livello logico alto all'uscita dell'optoisolatore e dell'interruzione Il pin del microcontrollore collegato all'uscita dell'optoisolatore tramite un transistor pnp riceve un segnale logico basso, che interrompe tutte le altre operazioni della pinza.
Pertanto, attraverso una semplice comunicazione RF, possiamo effettivamente controllare un robot pick and place.
Applicazioni pratiche del robot Pick and Place:
- Applicazioni per la difesa : Può essere utilizzato per la sorveglianza e anche per raccogliere oggetti nocivi come bombe e diffonderli in sicurezza.
- Applicazioni industriali : Questi robot sono utilizzati nella produzione, per raccogliere le parti richieste e posizionarle nella posizione corretta per completare l'attrezzatura del macchinario. Può essere utilizzato anche per posizionare oggetti sul nastro trasportatore e per prelevare prodotti difettosi dal nastro trasportatore.
- Applicazioni mediche : Questi robot possono essere utilizzati in varie operazioni chirurgiche come operazioni di sostituzione articolare, operazioni di chirurgia ortopedica e interna. Esegue le operazioni con maggiore precisione e accuratezza.
Oltre a queste applicazioni, questi robot possono essere utilizzati anche in varie altre applicazioni adatte all'umanità.
Ora la domanda rimane: quanto è lontano il giorno in cui i robot apriranno completamente la strada agli umani?