I circuiti integrati della serie TSOP17XX sono speciali sensori a infrarossi costruiti per rispondere a una gamma specifica di frequenze infrarosse e convertirli in un'uscita a impulsi elettrici. Presenta quindi un'immunità infallibile ad altre forme di segnali IR.
A causa di questa specifica frequenza operativa centrale o passa banda di un TSOP17XX, diventa difficile utilizzare questi sensori per progettare circuiti di controllo remoto basati sulla frequenza desiderati o personalizzati.
In questo post proveremo a trovare un'idea per consentire a questi sensori di funzionare con qualsiasi frequenza unica desiderata in modo che il circuito possa essere reso completamente a prova di errore.
Principio di funzionamento di base dei moduli sensore TSOP17XX
Se ci riferiamo al scheda tecnica del sensore IR TSOP17XX troviamo che l'IC ha alcune linee guida operative critiche per garantire il funzionamento corretto e ottimale del sensore in risposta a un segnale IR.
Per consentire il corretto funzionamento del sensore, il segnale IR deve essere oscillato al valore della frequenza centrale del passa-banda del dispositivo, e modulato a burst da 10 a 70 cicli, con un certo gap dopo ogni ciclo, come mostrato nell'immagine seguente.

L'immagine sopra mostra chiaramente che il raggio IR dal Tx deve essere pulsato con la frequenza centrale dell'IC che è generalmente compresa tra 30kHz e 39kHx, e modulato con burst di 10ms di gap.
Il TSOP risponde a questo segnale di frequenza centrale e si attiva, producendo una forma d'onda replicata alla sua uscita, in cui i 38 kHz vengono livellati in raffiche di normali impulsi a onda quadra.
Questa complessa forma d'onda operativa garantisce una maggiore immunità contro molte frequenze spurie che possono essere presenti nell'atmosfera emanate da lampadine, CFL Lke, lampade fluorescenti ecc.
Inconveniente dei sensori TSOP17XX
Sebbene il sensore presenti un funzionamento infallibile a causa di questo complesso schema di ricezione del segnale, la frequenza centrale fissa per i sensori TSOP limita il loro utilizzo solo a questo intervallo di frequenza specifico, rendendo impossibile creare circuiti di controllo remoto IR personalizzati unici utilizzando questi chip.
A causa di questo inconveniente, un sistema di controllo remoto basato su TSOP può essere normalmente azionato utilizzando qualsiasi comune telecomando TV o DVD e utilizzando uno qualsiasi dei pulsanti sull'unità di controllo.
Tuttavia nell'elettronica c'è sempre una soluzione alternativa per tutto, e anche per questi sensori possiamo creare un design che ci permetterà di utilizzare l'IC con una frequenza unica selezionata di nostra scelta in modo che il ricevitore venga commutato solo attraverso una particolare coppia Tx compatibile, e non con alcun ricevitore remoto comune disponibile.
Progettazione di un circuito di controllo remoto TSOP basato sulla frequenza unico
Dalla discussione sopra abbiamo capito che un sensore basato su TSOP richiede raffiche di frequenza di 38 kHz, o la frequenza centrale specificata per il funzionamento, che indica che il segnale coinvolge due frequenze in cui la frequenza centrale è costante ma la frequenza di burst è variabile e non critica .
L'idea è di catturare questa frequenza di burst a nostro favore e utilizzare un filtro che possa riconoscere questa frequenza per attivare l'uscita.
Il circuito del filtro può essere facilmente progettato utilizzando un Circuito del decodificatore di tono LM567 e usalo per decodificare una particolare frequenza di burst dall'uscita del sensore TSOP sul lato del ricevitore.
Il concetto di base può essere visto nel diagramma seguente.
Schema elettrico 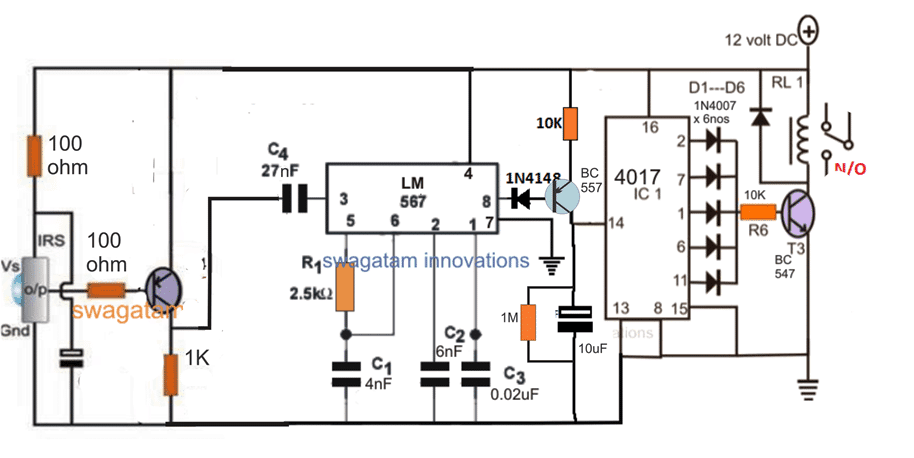

Funzionamento del circuito
Facendo riferimento allo schema circuitale sopra per l'implementazione di TSOP17XX con frequenze personalizzate, vediamo che si compone di 3 fasi di base:
- lo stadio del sensore TSOP17XX
- lo stadio del rivelatore di frequenza basato su LM567
- e il flip flop basato su IC 4017 o stadio circuitale bistabile.
Lo stadio TSOP17XX è configurato nella sua modalità standard, che preleva la frequenza modulata di 38kHz dall'unità Tx del trasmettitore e crea un'onda quadra pulsata come indicato nel primo diagramma.
Ci si può aspettare che questa uscita dal TSOP porti la frequenza di burst a cui siamo interessati. Questa può essere impostata su 1kHz, 2kHz o qualsiasi cosa al di sotto di 10kHz.
Ora vogliamo che il nostro stadio decodificatore di tono LM567 rilevi correttamente questa frequenza modulata, quindi dobbiamo assicurarci che R1 / C1 dello stadio LM567 sia calcolato in modo tale che l'oscillatore interno si agganci alla stessa frequenza che corrisponde ai burst di frequenza di modulazione dall'uscita TSOP .
Una volta impostati questi parametri, possiamo aspettarci che l'LM567 si agganci su ON non appena la frequenza selezionata viene rilevata dall'uscita TSOP78XX, mentre qualsiasi altra frequenza di modulazione viene semplicemente rifiutata.
Al rilevamento di una frequenza assegnata correttamente, l'uscita LM567 genera un segnale di trigger basso corrispondente sul pin n. 8, attivando il pin di ingresso flip flop basato su IC 4017 collegato n. 14 tramite PNP.
In questo modo siamo in grado di assegnare diverse frequenze univoche assicurando che l'attivazione del ricevitore sia abilitata solo tramite il microtelefono Tx corrispondente e non con un qualsiasi telecomando TV comune.
Realizzazione del circuito del trasmettitore personalizzato (Tx)
Nella discussione precedente abbiamo appreso come un sensore TSOP17XX può essere azionato con una frequenza personalizzata utilizzando uno stadio rilevatore di frequenza, tuttavia ciò significa anche che il trasmettitore (Tx) dovrà essere costruito in modo univoco per generare i segnali IR personalizzati.
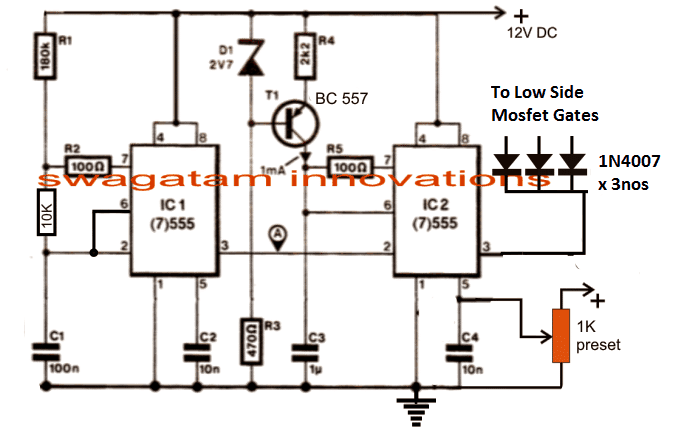
La figura seguente mostra come questo può essere implementato utilizzando un singolo IC 4049 e alcuni elementi passivi:

Le 6 porte provengono tutte dall'IC 4049, R3 può essere resistore da 10K mentre le preimpostazioni possono essere 100K. I cappucci C1 dovranno essere selezionati con qualche sperimentazione pratica. Il diodo può essere un 1N4148, le resistenze rimanenti possono essere selezionate 2K2.
Come si può vedere la coppia di gate superiore insieme a R3, preset e C1 è configurata come un oscillatore a rotazione libera, anche la sezione inferiore ha uno stadio identico.
La sezione superiore è alimentata ad un buffer gate intermedio la cui uscita è infine collegata al fotodiodo IR del trasmettitore.
L'intera sezione è configurata per generare la frequenza centrale di base per la compatibilità TSOP17XX che può variare da 32kHz a 38kHz a seconda delle specifiche del sensore selezionato.
L'oscillatore inferiore dovrebbe essere uno stadio modulante a bassa frequenza che può essere visto integrato con la sezione superiore tramite un diodo. Questa bassa frequenza commuta l'alta frequenza superiore per generare i 'burst 38kHz' richiesti sul diodo trasmettitore IR.
Questa bassa frequenza diventa effettivamente la nostra frequenza unica, o la frequenza del telecomando personalizzata prevista che deve essere abbinata alla frequenza LM567 in modo che entrambe le frequenze 'si stringano la mano' durante la comunicazione IR tra le unità Tx e Rx.
La bassa frequenza può essere selezionata da un qualsiasi valore compreso tra 1 kHz e 10 kHz, e questo intervallo selezionato deve essere impostato con precisione per lo stadio LM567 regolando opportunamente i suoi valori R1 / C1.
Questo conclude la nostra discussione su come modificare un circuito sensore TSOP17XX per adattarsi a gamme di frequenza speciali personalizzate o gamme di frequenza selezionate in modo univoco per rendere il sistema di controllo remoto assolutamente infallibile e personale.
Se hai dei dubbi sul concept, la casella dei commenti è tutta tua!
Precedente: Introduzione al sensore di colore RGB TCS3200 Avanti: Circuito rilevatore di colore con codice Arduino