Stabilizzatore di tensione servo
Per servo stabilizzatore di tensione è un meccanismo di controllo ad anello chiuso che serve a mantenere un'uscita di tensione bilanciata 3 o monofase nonostante le fluttuazioni in ingresso dovute a condizioni sbilanciate. La maggior parte dei carichi industriali sono carichi di motori a induzione trifase e in un ambiente di fabbrica reale, la tensione in 3 fasi è raramente bilanciata. Ad esempio, se le tensioni misurate sono 420, 430 e 440 V, la media è 430 V e la deviazione è 10 V.
La percentuale di squilibrio è data da
(10V X 100) / 430V = 2,3% Si è visto che uno sbilanciamento di tensione dell'1% aumenterà le perdite del motore del 5%.
Pertanto, lo squilibrio di tensione può aumentare le perdite del motore dal 2% al 90% e quindi anche la temperatura aumenta di una quantità eccessiva, il che si traduce in ulteriori perdite maggiori e riduzione dell'efficienza. Quindi si propone di intraprendere un progetto per mantenere una tensione di uscita bilanciata in tutte e 3 le fasi.
Monofase:
Si basa sul principio dell'addizione vettoriale della tensione CA all'Input per ottenere l'uscita desiderata utilizzando un trasformatore chiamato trasformatore Buck-Boost (T), il cui secondario è collegato in serie alla tensione di ingresso. Il primario dello stesso è alimentato da un trasformatore variabile montato su motore (R). A seconda del rapporto tra la tensione primaria e secondaria, la tensione indotta del secondario arriva in fase o fuori fase in base al fluttuazione di tensione . Il trasformatore variabile è solitamente alimentato dall'alimentazione di ingresso ad entrambe le estremità, mentre la presa di circa il 20% dell'avvolgimento è considerata un punto fisso per il primario del trasformatore Buck-Boost. Il punto variabile dell'autotrasformatore, quindi, è in grado di fornire il 20% di tensione fuori fase che viene utilizzata per il funzionamento in controtendenza mentre l'80% che è in fase con la tensione di ingresso e viene utilizzata per il funzionamento in boost. Il movimento del tergicristallo del trasformatore variabile è controllato rilevando la tensione di uscita a un circuito di controllo che decide la direzione di rotazione del motore sincrono alimentato attraverso una coppia di TRIAC al suo avvolgimento in fase divisa.
Correzione ingresso bilanciato a 3 fasi:
Per il funzionamento a bassa capacità diciamo circa 10KVA, si è attualmente visto che viene utilizzato un variac a doppia ferita eliminando il trasformatore Buck-Boost sul trasformatore variabile stesso. Ciò limita il movimento del tergicristallo di un variac a 250 gradi poiché il bilanciamento viene utilizzato per l'avvolgimento secondario. Sebbene questo renda il sistema economico, presenta seri inconvenienti in termini di affidabilità. Lo standard del settore non accetta mai una tale combinazione. Nelle aree di tensione di ingresso ragionevolmente bilanciata, i correttori servocomandati trifase vengono utilizzati anche per l'uscita stabilizzata mentre viene utilizzato un singolo variac trifase montato da un motore sincrono e da una singola scheda di controllo che rileva la tensione bifase su tre. Questo è molto più economico e utile se le fasi di ingresso sono ragionevolmente bilanciate. Ha lo svantaggio che mentre si verifica un grave sbilanciamento, l'uscita è proporzionalmente sbilanciata.
Correzione ingresso sbilanciato a 3 fasi:
Tre trasformatori in serie (T1, T2, T3), ogni secondo dei quali viene utilizzato, uno in ciascuna fase che aggiunge o sottrae la tensione dalla tensione di alimentazione in ingresso per fornire una tensione costante in ciascuna fase rendendo così l'uscita bilanciata dall'ingresso sbilanciato. L'ingresso al primario del trasformatore di serie è alimentato da ciascuna fase da un ogni autotrasformatore variabile (Variac) (R1, R2, R3) ciascuno dei cui tergicristalli è accoppiato ad un motore sincrono ac split phase (2 Coils) (M1, M2) M3). Il motore riceve l'alimentazione CA per ciascuna delle sue bobine tramite la commutazione a tiristori per la rotazione in senso orario o antiorario per abilitare la tensione di uscita desiderata dal variac al primario del trasformatore in serie, in fase o fuori fase, per eseguire addizioni o sottrazioni come richiesto al secondario del trasformatore di serie per mantenere una tensione costante ed equilibrata in uscita. Il feedback dall'uscita al circuito di controllo (C1, C2, C3) viene confrontato con una tensione di riferimento fissa da comparatori di livello formati da amplificatori operazionali per attivare il TRIAC secondo la necessità di azionare il motore.
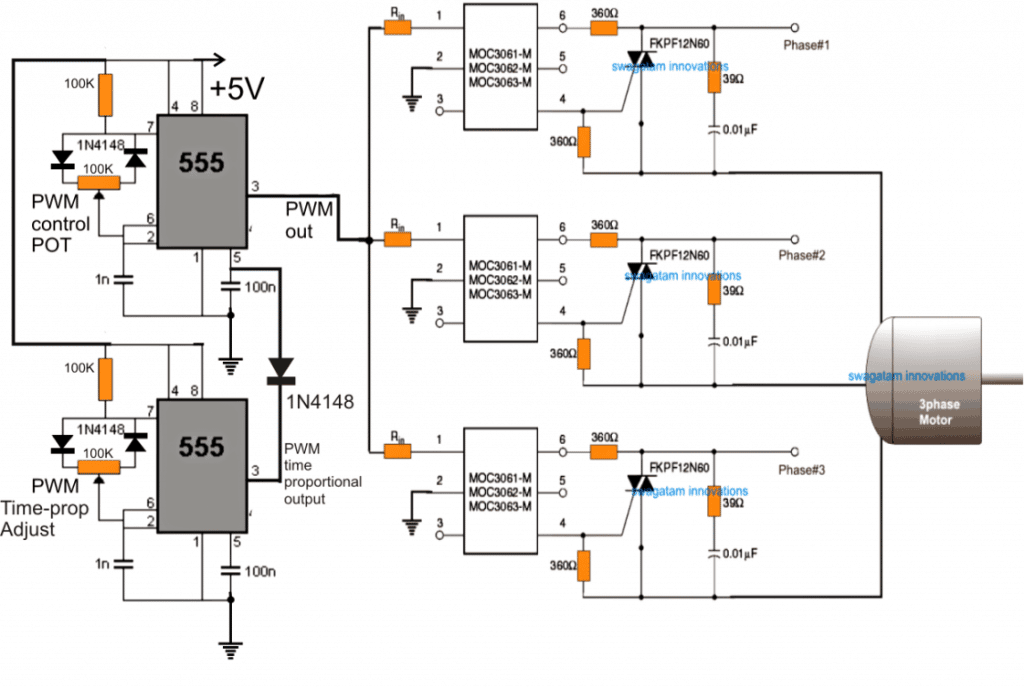
Questo schema è costituito principalmente da un circuito di controllo, un servomotore a induzione monofase accoppiato a un primario di alimentazione variabile di un trasformatore in serie per ciascuna fase.
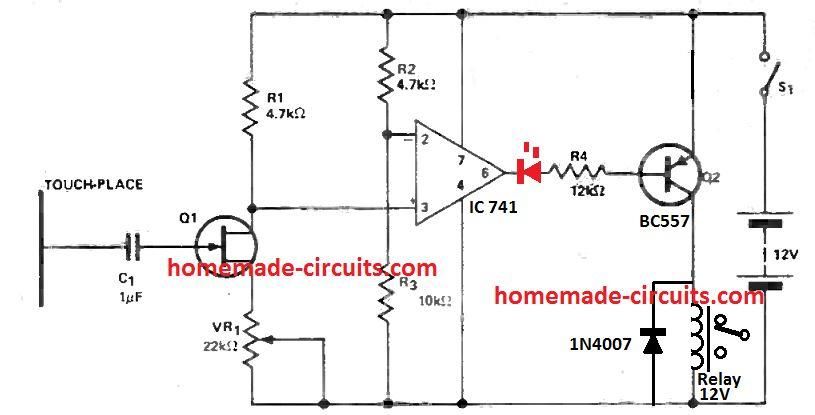
- Il circuito di controllo comprendente un comparatore a finestra cablato attorno ai transistor e l'amplificazione della tensione del segnale di errore RMS da IC 741 è montato in Multisim ed è simulato per varie condizioni operative di ingresso garantendo l'accensione dei TRIAC che azionerebbero il motore a induzione sfasato del condensatore è richiesta la direzione che controlla la rotazione del variac wiper.
- Sulla base dei valori massimi e minimi delle fluttuazioni di tensione, il trasformatore in serie ei trasformatori di controllo sono progettati utilizzando la formula standard corrispondente al nucleo di ferro disponibile in commercio e alle dimensioni del filo di rame super smaltato prima di avvolgerlo per l'utilizzo nel progetto.
Tecnologia:
In un sistema di alimentazione trifase bilanciato, tutte le tensioni e le correnti hanno la stessa ampiezza e sono sfasate di 120 gradi l'una dall'altra. Tuttavia, non è praticamente possibile in quanto tensioni sbilanciate possono provocare effetti negativi sulle apparecchiature e sul sistema di distribuzione elettrica.
In condizioni di sbilanciamento, il sistema di distribuzione subirà maggiori perdite ed effetti di riscaldamento e sarà meno stabile. L'effetto dello squilibrio di tensione può anche essere dannoso per apparecchiature come motori a induzione, convertitori elettronici di potenza e azionamenti a velocità regolabile (ASD). Una percentuale relativamente piccola di squilibrio di tensione con motore trifase determina un aumento significativo delle perdite del motore, che comporta anche una diminuzione dell'efficienza. I costi energetici possono essere ridotti al minimo in molte applicazioni riducendo la potenza del motore persa a causa dello squilibrio di tensione.
Squilibrio di tensione percentuale è definito da NEMA come 100 volte la deviazione della tensione di linea dalla tensione media divisa per la tensione media. Se le tensioni misurate sono 420, 430 e 440 V, la media è 430 V e la deviazione è 10 V.
Lo squilibrio percentuale è dato da (10 V * 100/430 V) = 2,3%
Quindi uno squilibrio di tensione dell'1% aumenterà le perdite del motore del 5%.
Lo squilibrio è quindi un grave problema di power quality, che interessa principalmente i sistemi di distribuzione in bassa tensione ed è quindi proposto nel progetto di mantenere una tensione bilanciata rispetto alla grandezza in ogni fase, mantenendo così la tensione di linea bilanciata.
INTRODUZIONE:
Gli stabilizzatori di tensione in corrente alternata servono per ottenere una corrente alternata stabilizzata. alimentazione dalla rete in entrata di fluttuazione. Trovano applicazioni in ogni campo dell'elettrico, dell'elettronica e di molti altri settori, istituti di ricerca, laboratori di test, istituti di istruzione, ecc.
Cos'è lo squilibrio:
La condizione di squilibrio si riferisce alla condizione in cui le 3 tensioni e correnti di fase non hanno la stessa ampiezza né lo stesso sfasamento.
Se una o entrambe queste condizioni non sono soddisfatte, il sistema viene chiamato sbilanciato o asimmetrico. (In questo testo, si presume implicitamente che le forme d'onda siano sinusoidali e quindi non contengano armoniche.)
Cause di squilibrio:
L'operatore di sistema cerca di fornire una tensione di sistema bilanciata al PCC tra la rete di distribuzione e la rete interna del cliente.
Le tensioni di uscita nel sistema trifase dipendono dalle tensioni di uscita dei generatori, dall'impedenza del sistema e dalla corrente di carico.
Tuttavia, poiché vengono utilizzati principalmente generatori sincroni, le tensioni generate sono altamente simmetriche e quindi i generatori non possono essere la causa dello squilibrio. I collegamenti a livelli di tensione inferiori di solito hanno un'impedenza elevata che porta a uno squilibrio di tensione potenzialmente maggiore. L'impedenza dei componenti del sistema è influenzata dalla configurazione delle linee aeree.
Conseguenze dello squilibrio di tensione:
La sensibilità delle apparecchiature elettriche allo squilibrio varia da un apparecchio all'altro. Di seguito viene fornita una breve panoramica dei problemi più comuni:
(a) Macchine a induzione:
Questi sono i a.c. macchine sincrone con campi magnetici rotanti indotti internamente, la cui grandezza è proporzionale all'ampiezza delle componenti dirette e / o inverse. Quindi nel caso di un'alimentazione sbilanciata, il campo magnetico rotante diventa ellittico invece che circolare. quindi le macchine a induzione affrontano principalmente tre tipi di problemi dovuti allo squilibrio di tensione
1. In primo luogo, la macchina non può produrre la sua coppia completa poiché il campo magnetico rotante inverso del sistema di sequenza negativa produce una coppia frenante negativa che deve essere sottratta dalla coppia di base legata al normale campo magnetico rotante. La figura seguente mostra le diverse caratteristiche di slittamento della coppia di una macchina a induzione con alimentazione sbilanciata

2. In secondo luogo, i cuscinetti possono subire danni meccanici a causa dei componenti della coppia indotta alla doppia frequenza del sistema.
3. Infine, lo statore e, soprattutto, il rotore vengono riscaldati eccessivamente, il che può portare a un più rapido invecchiamento termico. Questo calore è causato dall'induzione di correnti significative da parte del campo magnetico inverso a rotazione rapida (in senso relativo), come si vede dal rotore. Per poter far fronte a questo riscaldamento extra, il motore deve essere declassato, il che potrebbe richiedere l'installazione di una macchina di potenza nominale maggiore.
TECNOLOGIA:
Lo squilibrio di tensione può causare un guasto prematuro del motore, che non solo porta a un arresto non programmato del sistema, ma provoca anche grandi perdite economiche.
Gli effetti della bassa e dell'alta tensione sui motori e le relative modifiche delle prestazioni che ci si può aspettare quando si utilizzano tensioni diverse da quelle indicate sulla targhetta sono dati come segue:
Effetti della bassa tensione:
Quando un motore è soggetto a tensioni inferiori al valore di targa, alcune delle caratteristiche del motore cambieranno leggermente e altre cambieranno drasticamente.
La quantità di potenza assorbita dalla linea deve essere fissata per una quantità fissa di carico.
La quantità di potenza assorbita dal motore ha una correlazione approssimativa tra la tensione e la corrente (amp).
Per mantenere la stessa quantità di potenza, se la tensione di alimentazione è bassa, un aumento di corrente funge da compensazione. Tuttavia, è pericoloso poiché una corrente più elevata causa un maggiore accumulo di calore nel motore, che alla fine distrugge il motore.
Pertanto gli svantaggi dell'applicazione di bassa tensione sono il surriscaldamento del motore e il motore è danneggiato.
La coppia di avviamento, la coppia di trazione e la coppia di estrazione del carico principale (motori a induzione), in base alla tensione applicata al quadrato.
In generale, una riduzione del 10% dalla tensione nominale può portare a una bassa coppia di avviamento, tirare su e tirare fuori la coppia.
Effetti dell'alta tensione:
L'alta tensione può causare la saturazione dei magneti, facendo sì che il motore assorba una corrente eccessiva per magnetizzare il ferro. Pertanto anche l'alta tensione può causare danni. L'alta tensione riduce anche il fattore di potenza, provocando un aumento delle perdite.
I motori tollereranno alcune modifiche nella tensione al di sopra della tensione di progetto. Quando gli estremi al di sopra della tensione di progetto causano un aumento della corrente con corrispondenti variazioni di riscaldamento e una riduzione della durata del motore.
La sensibilità alla tensione influisce non solo sui motori ma anche su altri dispositivi. I solenoidi e le bobine presenti nei relè e negli avviatori tollerano la bassa tensione meglio di quanto non facciano l'alta tensione. Altri esempi sono alimentatori in lampade fluorescenti, mercurio e sodio ad alta pressione e trasformatori e lampade a incandescenza.
Nel complesso, è meglio per l'apparecchiatura se cambiamo le prese sui trasformatori in ingresso per ottimizzare la tensione sul pavimento dell'impianto a qualcosa di vicino ai valori nominali dell'apparecchiatura, che è il concetto principale alla base del concetto proposto di stabilizzazione della tensione nel progetto.
Regole per decidere la tensione di alimentazione
- I piccoli motori tendono ad essere più sensibili alla sovratensione e alla saturazione rispetto ai grandi motori.
- I motori monofase tendono ad essere più sensibili alla sovratensione rispetto ai motori trifase.
- I motori con telaio a U sono meno sensibili alla sovratensione rispetto ai telai a T.
- I motori Super-E ad alta efficienza sono meno sensibili alla sovratensione rispetto ai motori a efficienza standard.
- I motori a 2 e 4 poli tendono a risentire meno dell'alta tensione rispetto ai modelli a 6 e 8 poli.
- La sovratensione può aumentare l'amperaggio e la temperatura anche su motori poco caricati
- Anche l'efficienza viene influenzata poiché si riduce con la bassa o alta tensione
- Il fattore di potenza si riduce con l'alta tensione.
- La corrente di spunto aumenta con la tensione più alta.
Ottieni maggiori conoscenze su vari concetti e circuiti elettronici eseguendo alcuni mini progetti di elettronica a livello ingegneristico.