Il post fornisce una descrizione approfondita del concetto di circuito del motore Flynn e fornisce i dettagli di replica approssimativi per lo stesso.
Concetto di percorso parallelo
In uno dei miei post precedenti abbiamo avuto una visione completa di ciò che è popolarmente noto come teoria magnetica a cammini paralleli
In questa teoria viene utilizzata un'assistenza elettromagnetica relativamente più debole per manipolare una forza massiccia ottenuta da pochi magneti permanenti chiusi.
La stessa teoria, quando implementata per acquisire un movimento rotatorio, è in grado di creare una forza che non potrebbe essere raggiunta attraverso i concetti motori convenzionali.
Chiamato anche motore Flynn, la figura seguente è la rappresentazione di base o classica che mostra come la tecnologia del percorso parallelo potrebbe essere implementata per costruire motori con un'efficienza eccezionale.
Capire il motore Flynn
Il concetto utilizzato nel motore Flynn non è scienza missilistica, ma piuttosto una teoria magnetica molto semplice in cui l'attrazione magnetica dei magneti permanenti viene applicata per la generazione di enormi quantità di energia libera.
Le immagini seguenti mostrano il design di base del motore Fynns, che proprio come un normale motore ha uno statore esterno e un rotore interno.
Lo statore è una struttura di cancelleria composta da due sezioni ferromagnetiche appositamente dimensionate per facilitare le azioni di percorso parallelo proposte.
Progettazione dello statore / rotore
Fondamentalmente si tratta di due strutture ferromagnetiche a forma di 'C' che possiedono uno spazio di blocco centrale per accogliere un avvolgimento di bobina, mentre le estremità sono cesellate piatte per stringere una coppia di magneti permanenti tra le due strutture a 'C'.
Le strutture di cui sopra formano lo statore.
E 'visibile una struttura circolare anch'essa in materiale ferromagnetico posizionata esattamente al centro dei due statori a 'C'. Questo costituisce il rotore del progetto del motore Flynn proposto.
La struttura circolare del rotore di cui sopra racchiude cinque bracci convessi sporgenti alla sua circonferenza con una specifica forma ritagliata che forma un angolo calcolato con i bordi concavi complementari racchiusi con i due statore a forma di 'C'.
L'angolo relativo tra le superfici rotore / statore è configurato in modo tale che tutte le superfici non si trovino mai faccia a faccia in un dato istante.
Ora capiamo come la bobina del filo ei magneti permanenti interagiscono per generare la straordinaria quantità di forza proposta sul movimento del rotore.
Dettagli dell'avvolgimento per il motore
Finché l'avvolgimento sullo statore non è collegato all'ingresso elettrico specificato, tutte e quattro le superfici concave interne dello statore mostrano una uguale quantità di attrazione magnetica sui bracci del rotore mantenendo il movimento del rotore non influenzato.
L'attrazione magnetica sopra è causata dai due magneti permanenti posizionati nelle posizioni mostrate.
Ora non appena un ingresso elettrico viene alimentato attraverso l'avvolgimento (che deve alternarsi tra le due bobine a qualsiasi frequenza specificata) il rotore subisce l'effetto del percorso parallelo e risponde con una rotazione di coppia elevata con un RPM determinato dalla frequenza applicata tra le bobine dall'ingresso elettrico.
L'influenza rotazionale generata dall'effetto parallelo può essere compresa facendo riferimento al diagramma sottostante.
Supponiamo ora che la polarità della frequenza istantanea iniziale dell'ingresso della bobina tira il rotore e allinea i bracci A e B del rotore con le superfici 1 e 2 dello statore, inducendo un movimento in senso orario ...
l'istante successivo, non appena la polarità della bobina viene invertita, il suddetto movimento in senso orario viene rinforzato poiché la trazione magnetica a 'percorso parallelo' cerca di allineare i bracci del rotore C e D con le superfici 3/4 dello statore .... il successivo il cambio di polarità ripete la precedente procedura di allineamento.
L'influenza magnetica continua sopra spiegata (supportata dall'eccezionale tecnologia del percorso parallelo) costringe il rotore a subire un forte movimento rotatorio caratterizzato da un'efficienza che supera il 100%.
La coppia eccezionale indicata viene generata a causa dell'effetto del percorso parallelo attraverso il quale un ingresso elettrico relativamente più debole fa sì che i campi magnetici dei magneti permanenti racchiusi si concentrino alternativamente su entrambi i lati assicurandosi che il lato opposto sia sottoposto simultaneamente a una forza zero.
La velocità dell'azione di ribaltamento di cui sopra è determinata dalla frequenza dell'ingresso elettrico attraverso i due avvolgimenti.
Schema del motore Flynn

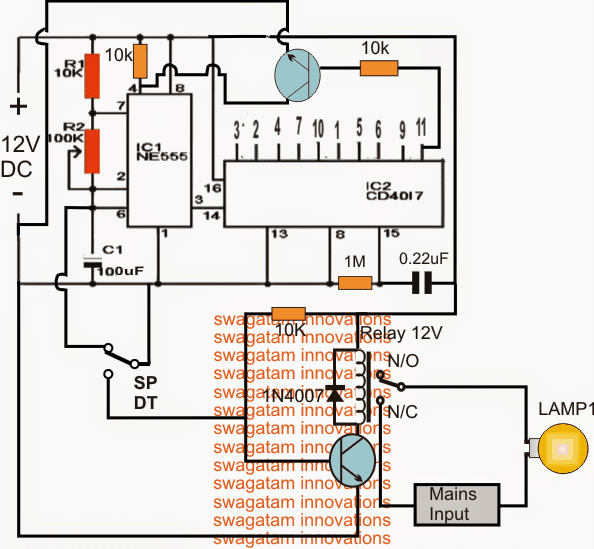
Come realizzare il circuito Flip Flop
Il flip flop o la commutazione alternata delle bobine dello statore possono essere implementati semplicemente utilizzando il circuito mostrato di seguito.
Il circuito non è affatto complicato, l'intera configurazione è costruita attorno all'IC 4047 e la commutazione avviene con l'aiuto di due mosfet.
Il rubinetto centrale della bobina può essere visto terminato al positivo mentre le estremità dei fili delle bobine sono collegate allo scarico del mosfet.
Gli RPM possono essere controllati con l'ausilio del potenziometro mostrato.
Schema Flip Flop

Precauzioni prima di costruire il motore Flynn
Alcune cose che devono essere prese in considerazione durante la costruzione del motore Flynn sopra spiegato.
- Le dimensioni del prototipo in prova non devono superare quelle di un normale motore del ventilatore.
- I magneti non dovrebbero essere troppo forti, una regola pratica è quella di selezionare un'area della sezione trasversale che può essere inferiore del 50% rispetto alla superficie che racchiude lo statore.
- Il numero di giri non deve essere troppo rapido, si dice che il motore Flynn funzioni al meglio a regimi più bassi dove è in grado di generare quantità eccezionali di coppia rispetto all'assorbimento elettrico alimentato.
- Lo spazio tra le superfici del rotore e dello statore non deve superare il segno di 0,5 mm.
Precedente: Circuito di controllo remoto FM basato su DTMF Avanti: Circuito caricatore per cellulare SMPS da 220 V