In questo articolo apprendiamo un circuito del temporizzatore in avanti inverso per azionare un meccanismo del motore dell'incubatrice con un insieme preferito di movimenti. L'idea è stata richiesta dal signor Anwar
Specifiche tecniche
Vengo dall'Indonesia ..... Ho bisogno di schemi per il timer dell'incubatrice con motore ad alta coppia (finestra di alimentazione del motore CC in auto). Sto cercando di far funzionare un motore CC in due direzioni fino a raggiungere la posizione finale, quindi si arresta e cambia la polarità in modo che funzioni nell'altra direzione quando viene riapplicata l'alimentazione. Quindi fai la stessa cosa dall'altra parte.
1. il timer accende l'alimentazione per 1 minuto. (7:00 am -7: 01am)
2. il motore gira in una direzione finché non raggiunge la posizione di arresto, diciamo 30 sec.
3. Il motore si spegne quando raggiunge la posizione di arresto e ritarda per 1 minuto. timer per terminare / spegnere l'alimentazione principale. inverte anche la polarità in modo che.
4. la prossima volta che si accende il timer principale (10: 00-10: 01) doserà la stessa cosa al contrario e ripetendo continuamente
5. Motore da 12 V CC inverso (solo due cavi dal motore + e -)
6. Necessità di un indicatore LED per il motore Rev / Fwd
Mi può aiutare signore?
Grazie in anticipo per qualsiasi aiuto.
Questo è un importante progetto di casa che deve essere affidabile al 100%.
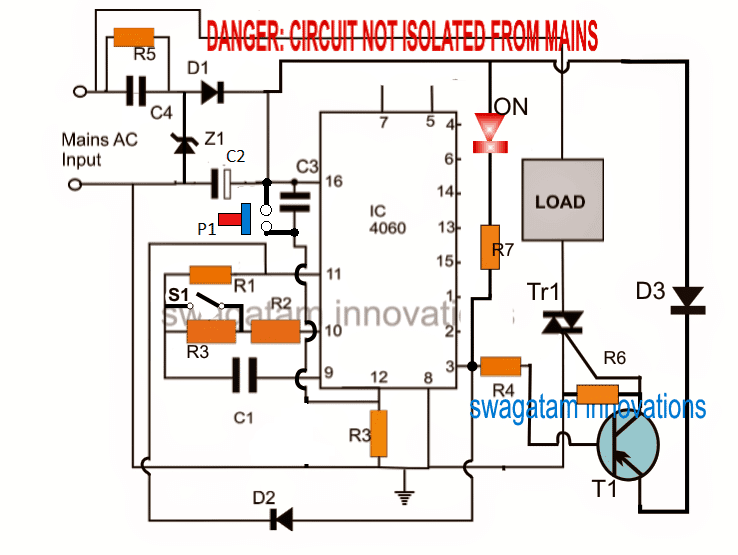
Il design

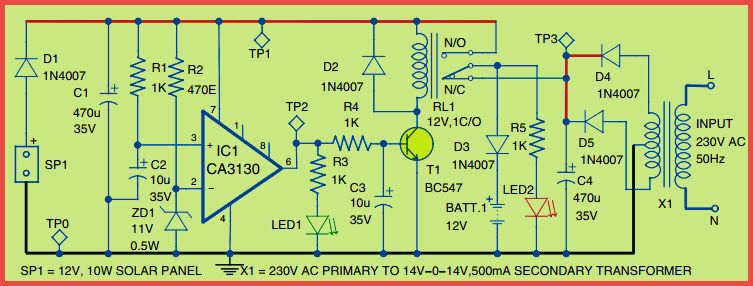
Nella figura sopra possiamo visualizzare un progetto per implementare il movimento in avanti inverso proposto di un motore incubatore dopo un intervallo di tempo predeterminato.
Nell'istante in cui si accende l'alimentazione abbiamo il seguente scenario:
Si può presumere che l'interruttore magnetico per 'set' sia in uno stato disattivato o premuto mentre il motore o il meccanismo dell'incubatore progettato si trova nella sua posizione iniziale zero.
Si noti che preferibilmente gli interruttori 'set' / 'reset' devono essere implementati utilizzando interruttori reed magnetici.
Con l'alimentazione attivata, l'IC 4060 viene ripristinato tramite C2 in modo da avviare il processo di conteggio da zero e il pin3 viene reso a logica zero.
Questa logica di zero iniziale viene alimentata tramite C3 alla base di T1 che conduce istantaneamente forzando l'attivazione di T3 e del suo relè associato. R7 nel processo si assicura che T1 / T3 vengano agganciati in questa modalità.
Il relè DPDT a questo punto si attiva in corrispondenza dei suoi contatti N / O avviando il motore e il meccanismo verso un presunto movimento 'in avanti'.
Non appena il motore inizia a muoversi, il pulsante 'set' viene rilasciato in modo tale che T4 e SPDT superiore abbiano l'opportunità di attivarsi, in cui il relè SPDT raggiunge una commutazione di posizione N / O rendendo i contatti N / C del DPDT con uno standby fornitura..
Il motore e / o il meccanismo continuano a muoversi fino a quando non ha raggiunto la posizione di 'reset' che provoca l'attivazione di T2 e la rottura del fermo T1 / T4.
Con T4 spento, il relè DPDT cambia la sua posizione da N / O a N / C e fornisce un movimento opposto (inverso) al meccanismo del motore.
Il meccanismo del motore dell'incubatore ora inverte la sua direzione e avvia un movimento inverso fino a raggiungere il punto di 'impostazione' che spegne rapidamente l'unità base del T4, l'SPDT spegne la potenza di taglio del DPDT e l'intero meccanismo si ferma .
Nel frattempo l'IC 4060 continua a contare fino a quando non ha prodotto ancora una logica zero dopo aver attraversato una logica alta al suo pin3 (scaricando C3).
Il ciclo viene nuovamente avviato e ripete la procedura come spiegato sopra.
Precedente: Lampeggiamento di un LED con Arduino - Tutorial completo Successivo: Esplorazione del soppressore di sovratensioni di rete industriale ad alta potenza