Questo versatile circuito integrato di controllo del motore Brushless (BLDC) consente di controllare qualsiasi motore BLDC trifase ad alta tensione, alta corrente, dotato di sensore ad effetto hall con estrema precisione e sicurezza. Impariamo i dettagli in profondità.

Utilizzando l'IC MC33035
L'``eroe '' del circuito è il controller a chip singolo MC33035 che è un modulo IC di seconda generazione ad alte prestazioni, dotato di tutte le funzioni attive richieste che possono essere richieste per eseguire BLDC ad alta corrente, alta tensione, trifase o 4 fasi motori con configurazione ad anello aperto o ad anello chiuso.

L'IC è dotato di un decodificatore della posizione del rotore per consentire una sequenza di commutazione accurata, riferimento compensato in temperatura per facilitare la corretta tensione del sensore, un oscillatore a dente di sega a frequenza programmabile, tre stadi driver high-side a collettore aperto integrati e tre totem-pole ad alta corrente driver di tipo low-side, progettati specificamente per il funzionamento di uno stadio di controllo del motore mosfet ad alta potenza con ponte H trifase.
Il chip è inoltre rinforzato internamente con funzionalità di protezione di fascia alta e fasi di controllo infallibili come il blocco della sottotensione, la limitazione della corrente ciclo per ciclo attraverso un'opzione di spegnimento con blocco ritardato regolabile, spegnimento per alta temperatura IC interno e un pinout dell'uscita di guasto che può essere interfacciato con un MCU per un'elaborazione avanzata preferita e feed back.
Le funzioni tipiche che possono essere eseguite con questo IC sono, controllo della velocità ad anello aperto, controllo della direzione di marcia avanti indietro, 'abilitazione marcia', una funzione di freno dinamico di emergenza.
L'IC è progettato per funzionare con sensori del motore aventi fasi da 60 a 300 gradi o da 120 a 240 gradi, come bonus l'IC può essere utilizzato anche per il controllo dei tradizionali motori a spazzole.
Come funziona l'IC
L'MC33035 è tra i numerosi controllori per motori brushless CC monolitici ad alta efficienza creati da Motorola .
Si compone di quasi le capacità necessarie per avviare un sistema di controllo motore completo, ad anello aperto, trifase o quadrifase.
Inoltre, il controller può essere realizzato per controllare i motori a spazzole CC. Progettato con tecnologia analogica bipolare, offre un livello superiore di efficienza e durata in un ambiente industrializzato spietato.
L'MC33035 è dotato di un decodificatore della posizione del rotore per un accurato sequenziamento della commutazione, un riferimento rimborsato per l'ambiente competente a fornire una potenza del sensore, un oscillatore a dente di sega programmabile in frequenza, un amplificatore di errore completamente accessibile, un comparatore del modulatore di larghezza di impulso, 3 uscite di azionamento superiori a collettore aperto e 3 Le uscite driver inferiori del totem ad alta corrente sono perfette per i MOSFET di potenza operativa.
Nell'MC33035 sono incorporate funzionalità di schermatura che includono blocco di sottotensione, limitazione della corrente ciclo per ciclo con una modalità di spegnimento con blocco ritardato selezionabile, spegnimento termico integrato, insieme a un'uscita di guasto esclusiva che sarà comodamente interfacciata a un controller a microprocessore.
Gli attributi di controllo del motore standard comprendono il controllo della velocità ad anello aperto, la rotazione in avanti o indietro, l'abilitazione alla marcia e la frenatura dinamica. Inoltre, l'MC33035 ha un pin di selezione 60 ° / 120 ° che configura il decodificatore della situazione del rotore per gli ingressi di fasatura elettrica del sensore a 60 ° o 120 °.

Funzioni PIN OUT:
Pin1, 2, 24 (Bt, At, Ct) = Queste sono le tre uscite dell'azionamento superiori dell'IC specificato per azionare i dispositivi di alimentazione configurati esternamente come i BJT. Questi pinout sono configurati internamente come modalità open collector.
Pin # 3 (Fwd, Rev) = Questa piedinatura deve essere utilizzata per controllare la direzione di rotazione del motore.
Pin # 4, 5, 6 (Sa, Sb, Sc) = Si tratta di 3 uscite sensore dell'IC assegnate al comando della sequenza di controllo del motore.
Pin # 7 (abilitazione uscita) = Questo pin dell'IC è assegnato per abilitare il funzionamento del motore fintanto che qui viene mantenuta una logica alta, mentre una logica bassa è per abilitare un arresto per inerzia del motore.
Pin # 8 (uscita di riferimento) = Questo pin è abilitato con una corrente di alimentazione per caricare il condensatore di temporizzazione dell'oscillatore Ct e fornisce un livello di riferimento per l'amplificatore di errore. Può essere utilizzato anche per fornire alimentazione ai circuiti integrati dei sensori a effetto Hall del motore.
Pin # 9 (ingresso non invertente Current Sense) : L'uscita del segnale di 100 mV può essere ottenuta da questo pinout con riferimento al pin # 15 e viene utilizzata per annullare la conduzione dell'interruttore di uscita durante un ciclo dell'oscillatore specificato. Questo pinout normalmente si collega al lato superiore del resistore di rilevamento della corrente.
Pin # 10 (oscillatore) : Questo pinout determina la frequenza dell'oscillatore per l'IC con l'aiuto della rete RC Rt e Ct.
Pin # 11 (ingresso non invertente dell'amplificatore di errore) : Questa piedinatura viene utilizzata con il potenziometro di controllo della velocità.
Pin # 12 (ingresso invertente dell'amplificatore di errore) : Questo pin è collegato internamente con l'uscita dell'amplificatore di errore sopra menzionata per abilitare le applicazioni ad anello aperto .
Pin # 13 (uscita amplificatore errore / ingresso PWM) : La funzione di questo pinout è di fornire la compensazione durante le applicazioni ad anello chiuso.
Pin # 14 (uscita guasto) : Questa uscita dell'indicatore di guasto può diventare una logica attiva bassa durante alcune condizioni critiche come: codice di ingresso non valido per il sensore, pinout abilitato alimentato con una logica zero, pinout dell'ingresso di rilevamento corrente superiore a 100 mV (@ pin9 con riferimento al pin15) , attivazione del blocco di sottotensione o una situazione di arresto termico).
Pin # 15 (ingresso di inversione del rilevamento della corrente) : Questo pin è impostato per fornire il livello di riferimento per la soglia interna di 100 mV e può essere visto collegato al resistore di rilevamento della corrente del lato inferiore.
Pin # 16 (GND) : Questo è il pin di massa dell'IC ed è designato per fornire il segnale di massa al circuito di controllo ed è necessario fare riferimento alla massa della fonte di alimentazione.
Pin n. 17: (Vcc) : Questo è il pin positivo di alimentazione specificato per fornire la tensione positiva al circuito di controllo dell'IC. La gamma minima di funzionamento di questo pin è di 10 V e quella massima di 30 V.
Pin # 18 (Vc) : Questa piedinatura imposta lo stato alto (Voh) per le uscite inferiori del drive attraverso la potenza attribuita a questo pin. Il palco funziona con una gamma da 10 a 30 V.
Pin # 19, 20, 21 (Cb, Bb, Ab) : Queste tre piedinature sono disposte internamente sotto forma di uscite totem pole e sono assegnate per pilotare i dispositivi di potenza di uscita del convertitore inferiore.
Pin # 22 (selezione sfasamento 60 D, 120D) : Lo stato attribuito a questo pinout configura il funzionamento del circuito di controllo con i sensori ad effetto Hall per ingressi con angolo di fase di 60 gradi (logica alta) o 120 gradi (logica bassa).
Pin # 23 (freno) : Una logica bassa a questo pinout consentirà al motore BLDC di funzionare senza problemi, mentre una logica alta interromperà istantaneamente il funzionamento del motore attraverso una rapida decelerazione.
DESCRIZIONE FUNZIONALE
Un diagramma a blocchi interno rappresentativo è mostrato nella figura sopra. Un discorso sui vantaggi e sul funzionamento di ciascuno dei blocchi centrali elencati di seguito.
Decodificatore posizione rotore
Un decodificatore della posizione del rotore interno misura i 3 ingressi del sensore (pin 4, 5, 6) per eseguire il rendering della sequenza corretta delle piedinature dell'unità superiore e inferiore. Gli ingressi dei sensori sono realizzati per interfacciarsi direttamente con interruttori a effetto Hall di tipo a collettore aperto o accoppiatori opto.
I resistori pull-up integrati sono classificati per ridurre la quantità necessaria di parti esterne. Gli ingressi sono TTL compatibili, con le loro soglie tipicamente a 2,2 V.
La gamma di circuiti integrati MC33035 è destinata al controllo di motori trifase e funziona con 4 delle più comuni convenzioni di fasatura dei sensori. Un Select 60 ° / 120 ° (Pin 22) è opportunamente fornito e fornisce l'MC33035 per configurarsi da solo per regolare motori con fasatura del sensore elettrico di 60 °, 120 °, 240 ° o 300 °.
Con 3 ingressi sensore scoprirai 8 potenziali formazioni di codici di ingresso, 6 delle quali sono posizionamenti legittimi del rotore.
Gli altri due codici sono obsoleti poiché sono generalmente il risultato di una connessione del sensore aperta o in cortocircuito.
Con 6 codici di ingresso giustificabili, il decodificatore può eventualmente occuparsi della posizione del rotore del motore entro uno spettro di 60 gradi elettrici.
L'ingresso Avanti / Indietro (Pin 3) viene utilizzato come strumento per modificare l'andamento del programma del motore invertendo la tensione sull'avvolgimento dello statore.
Non appena l'ingresso altera lo stato, da alto a basso utilizzando un codice di programma di ingresso sensore assegnato (ad esempio 100), le uscite dell'azionamento superiore e di base facilitate che utilizzano lo stesso stato alfa vengono scambiate (da AT ad AB, da BT a BB, da CT a CB).
In sostanza, la stringa modificabile viene cambiata direzione e il motore inverte la sequenza direzionale. Il controllo di accensione / spegnimento del motore si ottiene tramite l'abilitazione dell'uscita (pin 7).
Ogni volta che viene lasciato scollegato, un'alimentazione di corrente interna da 25 μA consente il sequenziamento delle uscite dell'azionamento principale e di base. Quando sono messe a terra, le uscite dell'azionamento della parte superiore si disattivano e gli azionamenti della base vengono spinti al minimo, provocando l'arresto del motore e l'attivazione dell'uscita Fault.
La frenatura dinamica del motore consente di sviluppare un margine di protezione in eccesso nel dispositivo finale. Il sistema di frenatura si ottiene ponendo il tuo ingresso freno (pin 23) in uno stato più alto.
Questo fa sì che le uscite superiori del convertitore si disattivino e le unità inferiori si attivino, cortocircuitando nuovamente l'EMF generato dal motore. L'ingresso del freno possiede una considerazione assoluta e sincera su tutti gli altri ingressi. Il resistore di pull-up interno da 40 kΩ si interfaccia con le linee di corrente utilizzando l'interruttore di sicurezza del programma garantendo l'attivazione del freno in caso di apertura o chiusura.
La tabella della verità della logica di commutazione è mostrata di seguito. Una porta NOR a 4 ingressi viene utilizzata per esaminare l'ingresso del freno e gli ingressi ai 3 BJT di uscita dell'azionamento superiore.

L'obiettivo è solitamente quello di disattivare la frenatura prima che le uscite dell'azionamento superiore raggiungano uno stato alto. Ciò consente di evitare il leasing sincronizzato degli interruttori di alimentazione superiore e base.
Nei programmi di azionamento del motore a mezza onda, i componenti dell'azionamento superiore in genere non sono necessari e nella maggior parte dei casi vengono tenuti staccati. Con questi tipi di circostanze la frenatura sarà ancora ottenuta perché il gate NOR rileva la tensione di base ai BJT di uscita dell'azionamento superiore.
Amplificatore di errori
Viene offerto un amplificatore di errore completamente compensato con efficienza migliorata con accesso attivo a ciascun ingresso e uscita (pin 11, 12, 13) per assistere nell'esecuzione del controllo della velocità del motore ad anello chiuso.
L'amplificatore è dotato di un guadagno di tensione CC standard di 80 dB, una larghezza di banda di guadagno di 0,6 MHz, insieme a un ampio intervallo di tensione di modo comune di ingresso che si estende da terra a Vref.
Nella maggior parte dei programmi di controllo della velocità ad anello aperto, l'amplificatore è impostato come un seguitore di tensione a guadagno unitario con l'ingresso non invertente accoppiato all'alimentazione di tensione impostata per la velocità.
Oscillatore La frequenza dell'oscillatore a rampa interna è cablata tramite i valori decisi per gli elementi di temporizzazione RT e CT.
Il TA del condensatore verrà caricato tramite l'uscita di riferimento (Pin 8) tramite il resistore RT e scaricato tramite un transistor di scarica interno.
Le tensioni di picco e di fossa della rampa sono normalmente di 4,1 V e 1,5 V corrispondentemente. Per offrire una discreta riduzione del rumore udibile e delle prestazioni di commutazione dell'uscita, si consiglia una frequenza dell'oscillatore nella selezione da 20 a 30 kHz. Fare riferimento alla Figura 1 per la selezione dei componenti.
Modulatore di larghezza di impulso
La modulazione di larghezza di impulso integrata offre un approccio efficace in termini di potenza per regolare la velocità del motore alterando la tensione standard attribuita a ogni avvolgimento dello statore in tutta la serie di commutazione.
Quando il CT si scarica, ciascun modello dell'oscillatore si blocca, consentendo la conduzione delle uscite del convertitore superiore e inferiore. Il comparatore PWM ripristina il latch superiore, terminando il leasing dell'uscita del convertitore inferiore una volta che la rampa positiva del CT supera il risultato dell'amplificatore di errore.
Il diagramma temporale del modulatore di larghezza di impulso è illustrato nella Figura 21.
La modulazione della larghezza di impulso per la gestione della velocità si presenta esclusivamente alle uscite inferiori del convertitore. Limite di corrente Il funzionamento costante di un motore che può essere notevolmente sovraccarico porta a surriscaldamento e inevitabili malfunzionamenti.
Questa situazione dannosa può essere facilmente evitata al meglio insieme all'uso della restrizione di corrente ciclo per ciclo.
Cioè, ogni ciclo attivo viene considerato come una funzione indipendente. La limitazione della corrente ciclo per ciclo si ottiene monitorando l'accumulo di corrente dello statore ogni volta che si attiva un interruttore di uscita e dopo aver rilevato una situazione di corrente elevata, disabilitando immediatamente l'interruttore e mantenendolo spento per il periodo rimanente dell'intervallo di accelerazione dell'oscillatore.
La corrente dello statore viene trasformata in tensione applicando una resistenza di rilevamento con riferimento a massa RS (Figura 36) in linea con i 3 transistor dell'interruttore della parte inferiore (Q4, Q5, Q6).
La tensione stabilita lungo il resistore di anticipo viene supervisionata con l'ingresso di rilevamento della corrente (pin 9 e 15) e confrontata con il punto di riferimento interno di 100 mV.
Gli ingressi del comparatore di rilevamento corrente sono dotati di un intervallo di modalità comune di ingresso di circa 3,0 V.
Nel caso in cui la tolleranza di rilevamento della corrente di 100 mV venga superata, il comparatore ripristina il blocco di rilevamento inferiore e termina la conduzione dell'interruttore di uscita. Il valore per il resistore di rilevamento della corrente è in realtà:
Rs = 0,1 / Istatore (max)
L'uscita Fault si avvia in una situazione di amplificazione elevata. L'impostazione PWM a doppio latch garantisce che nel corso di una determinata routine dell'oscillatore si verifichi un solo impulso di trigger di uscita, indipendentemente dal fatto che sia terminato o meno tramite l'uscita dell'amplificatore di errore o del comparatore del limite di corrente.
Il regolatore on-chip da 6,25 V (Pin 8) offre corrente di carica per il condensatore di temporizzazione dell'oscillatore, un punto di riferimento per l'amplificatore di errore, che gli consente di fornire 20 mA di corrente appropriata per alimentare specificamente i sensori nei programmi a bassa tensione.
In scopi di tensione più ampia, questo potrebbe diventare importante per scambiare la potenza emessa dal regolatore dall'IC. Ciò è sicuramente ottenuto con l'aiuto di un altro pass transistor, come mostrato nella Figura 22.
Un punto di riferimento di 6,25 V sembrava essere stato deciso per consentire il rendering del semplice circuito NPN, laddove Vref - VBE supera la tensione minima essenziale per i sensori a effetto Hall sul calore.
Avendo un adeguato assortimento di transistor e un dissipatore di calore sufficiente, è possibile acquistare fino a 1 amp di corrente di carico.
Undervoltage-Lockout
Un blocco di sottotensione a tre vie è stato integrato per ridurre i danni al circuito integrato e ai transistor dell'interruttore di alimentazione alternativo. Durante i fattori di alimentazione bassa, garantisce il fatto che IC e sensori siano completamente funzionali e che vi sia una tensione di uscita di base adeguata.
Gli alimentatori positivi all'IC (VCC) e ai bassi azionamenti (VC) sono esaminati ciascuno da comparatori indipendenti che ottengono le loro soglie a 9,1 V. Questo particolare stadio garantisce un adeguato cambio di gate richiesto per raggiungere un basso RDS (acceso) ogni volta che si aziona la potenza ordinaria Apparecchiature MOSFET.
Ogni volta che si eccitano direttamente i sensori Hall dal riferimento, si verifica un funzionamento inappropriato del sensore nel caso in cui la tensione di uscita del punto di riferimento scenda al di sotto di 4,5 V.
Un terzo comparatore può essere utilizzato per riconoscere questo problema.
Quando più di uno dei comparatori rileva una situazione di sottotensione, l'uscita di guasto viene attivata, le corse superiori vengono disattivate e le uscite del convertitore di base sono organizzate in un punto basso.
Ciascuno dei comparatori incorpora l'isteresi per proteggere dalle ampiezze quando si superano le proprie soglie individuali.
Uscita di guasto
L'uscita di guasto a collettore aperto (Pin 14) era stata concepita per offrire dettagli di analisi in caso di interruzione del processo. Ha una capacità di assorbimento di corrente di 16 mA e può pilotare specificamente un diodo a emissione di luce per il segnale visibile. Inoltre, è effettivamente opportunamente interfacciato con la logica TTL / CMOS per l'uso in un programma governato da microprocessore.
L'uscita di guasto è efficace bassa mentre si verifica più di una delle situazioni successive:
1) Codici di ingresso sensore non validi
2) Abilitazione uscita a [0] logico
3) Ingresso di rilevamento corrente superiore a 100 mV
4) Blocco sottotensione, attivazione di 1 o più comparatori
5) Arresto per riscaldamento, massima temperatura di giunzione ottimale Questa uscita esclusiva può essere utilizzata anche per distinguere tra avviamento del motore o funzionamento duraturo in una situazione sommersa.
Con l'aiuto di una rete RC tra l'uscita di guasto e l'ingresso di abilitazione, ciò significa che è possibile sviluppare uno spegnimento con blocco ritardato rispetto alla sovracorrente.
La circuiteria aggiuntiva mostrata nella Figura 23 aiuta a rendere facile l'avvio di sistemi motore dotati di carichi inerziali più elevati fornendo una coppia di spunto supplementare, pur mantenendo una protezione da sovracorrente sicura. Questo compito si ottiene posizionando il limite di corrente al valore successivo al minimo per un periodo stabilito. Nel corso di una situazione di sovracorrente estremamente lunga, il condensatore CDLY si caricherà, invocando l'ingresso di abilitazione per superare la sua tolleranza a una condizione bassa.
Un latch può ora essere modellato dal ciclo di feedback positivo dall'uscita di guasto all'abilitazione dell'uscita. Quando impostato, dall'ingresso di rilevamento corrente, può essere ripristinato solo cortocircuitando CDLY o ciclando gli alimentatori.
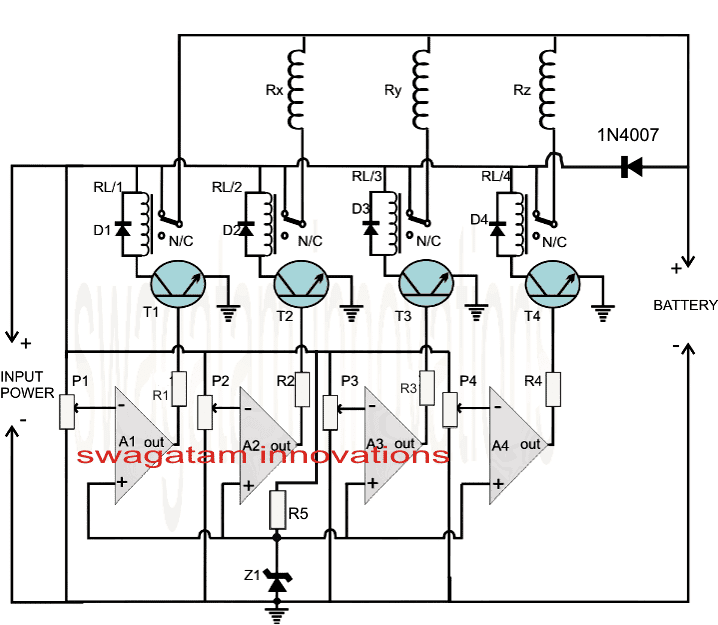
Schema BLDC ad alta potenza completamente funzionale
Un circuito controller BLDC ad alta potenza e alta corrente completamente funzionale che utilizza il dispositivo sopra spiegato può essere visto di seguito, è configurato come una modalità a onda intera, trifase, a 6 fasi:

Precedente: Calcolo di tensione, corrente in un induttore Buck Avanti: Crea questo circuito per scooter elettrico / risciò