Un circuito che consente a un motore collegato di funzionare in senso orario e antiorario tramite trigger di ingresso alternativi è chiamato circuito di controllo bidirezionale.
Il primo progetto di seguito discute un circuito di controller del motore bidirezionale basato su ponte completo o H bridge che utilizza i 4 amplificatori operazionali dell'IC LM324. Nel secondo articolo apprendiamo un circuito di controllo del motore bidirezionale a coppia elevata che utilizza IC 556
introduzione
In genere, interruttori meccanici sono abituati a regolare la direzione di rotazione di un motore CC. Regolando la polarità della tensione utilizzata e il motore ruota nella direzione opposta!
Da un lato questo può avere l'inconveniente che è necessario aggiungere un interruttore DPDT per modificare la polarità della tensione, ma abbiamo a che fare solo con un interruttore che rende la procedura abbastanza semplice.
Tuttavia DPDT potrebbe avere un problema serio, non è consigliabile invertire bruscamente la tensione su un motore CC durante il suo movimento rotatorio. Ciò può provocare un picco di corrente, che potrebbe bruciare il regolatore di velocità associato.
Inoltre, qualsiasi tipo di stress meccanico può anche causare problemi simili. Questo circuito supera facilmente queste complicazioni. La direzione e la velocità vengono manipolate con l'aiuto di un potenziometro solitario. Ruotando la pentola in una direzione specificata, il motore inizia a ruotare.
La commutazione della pentola nella direzione opposta consente al motore di ruotare al contrario. La posizione centrale sulla pentola spegne il motore, assicurandosi che il motore rallenti prima e poi si fermi prima che venga fatto uno sforzo per cambiare la direzione.
Specifiche tecniche
voltaggio: Il circuito e il motore utilizzano l'alimentazione comune. Ciò implica che, poiché la massima tensione di lavoro del LM324 è 32VDC anche questa diventa la tensione massima accessibile per azionare il motore.
Attuale: Il MOSFET IRFZ44 è progettato per 49A, l'IRF4905 sarà in grado di gestire 74A. Tuttavia le tracce PCB che corrono dai pin del MOSFET alla morsettiera a vite possono gestire solo circa 5A. Ciò potrebbe essere migliorato saldando pezzi di filo di rame sulle tracce PCB.
In tal caso, assicurati che i MOSFET non si surriscaldino troppo - se lo fanno, sarà necessario montare dissipatori di calore più grandi su questi dispositivi.
Pinout LM324

CONTROLLO BIDIREZIONALE DI MOTORI CC CON LM324
Fondamentalmente, troverai 3 modi per farlo regolare la velocità dei motori DC :
1. Utilizzando ingranaggi meccanizzati per ottenere l'accelerazione ideale: Questo approccio è spesso al di sopra della comodità della maggior parte degli appassionati che praticano nei laboratori domestici.
Due. Diminuendo la tensione del motore tramite una resistenza in serie. Questo può essere certamente inefficiente (la potenza verrà dissipata nel resistore) e anche comportare la riduzione della coppia.
La corrente consumata dal motore aumenta anche all'aumentare del carico sul motore. L'aumento della corrente significa una maggiore caduta di tensione sul resistore in serie e quindi una caduta di tensione per il motore.
Il motore quindi fa uno sforzo per tirare una quantità di corrente ancora maggiore, provocando lo stallo del motore.
3. Applicando l'intera tensione di alimentazione al motore in brevi impulsi: Questo metodo elimina l'effetto di caduta della serie. Questo è indicato come modulazione di larghezza di impulso (PWM) ed è la strategia trovata in questo circuito. Gli impulsi rapidi consentono al motore di funzionare lentamente. Gli impulsi prolungati consentono al motore di funzionare più rapidamente.

COME FUNZIONA (fare riferimento allo schema)
Il circuito potrebbe essere suddiviso in quattro fasi:
1. Controllo motore - IC1: A
2. Generatore di onde triangolari - IC1: B
3. Comparatori di tensione - IC1: C e D
4. Azionamento del motore - Q3-6
Cominciamo con la fase del driver del motore, incentrata sui MOSFET Q3-6. Solo un paio di questi MOSFET rimangono nello stato attivato in qualsiasi istante di tempo. Mentre Q3 e Q6 sono ON, la corrente si muove attraverso il motore e lo fa ruotare in un'unica direzione.
Non appena Q4 e Q5 sono in condizione di funzionamento, la circolazione di corrente viene invertita e il motore inizia a ruotare nella direzione opposta. IC1: C e IC1: D si occupano di quali MOSFET sono accesi.
Gli amplificatori operazionali IC1: C e IC1: D sono cablati come comparatori di tensione. La tensione di riferimento per questi amplificatori operazionali è prodotta dal partitore di tensione del resistore di R6, R7 e R8.
Si osservi che la tensione di riferimento per IC1: D è collegata all'ingresso '+' ma per IC1: C è accoppiata all'ingresso '-'.
Ciò significa che IC1: D viene attivato con una tensione superiore al suo riferimento mentre IC1: C viene richiesto con una tensione inferiore al suo riferimento. Opamp IC1: B è configurato come un generatore di onde triangolari e fornisce il segnale di attivazione ai relativi comparatori di tensione.
La frequenza è all'incirca l'inverso della costante di tempo di R5 e C1 - 270Hz per i valori impiegati.
Diminuendo R5 o C1 si aumenta la frequenza, aumentando uno di questi si ridurrà la frequenza. Il livello di uscita picco-picco dell'onda triangolare è molto inferiore alla differenza tra i due riferimenti di tensione.
È quindi estremamente difficile attivare contemporaneamente entrambi i comparatori. Oppure tutti e 4 i MOSFET inizierebbero a condurre, portando a un cortocircuito e rovinandoli tutti.
La forma d'onda triangolare è strutturata attorno a una tensione di offset CC. L'aumento o la diminuzione della tensione di offset varia in modo appropriato la posizione dell'impulso dell'onda triangolare.
Commutando l'onda triangolare verso l'alto si abilita il comparatore IC1: D ad attivarsi diminuendo si ottiene l'attivazione del comparatore IC1: C. Quando il livello di tensione dell'onda triangolare è a metà dei due riferimenti di tensione, nessuno dei comparatori viene indotto. La tensione di offset CC è regolata dal potenziometro P1 tramite IC1: A, progettato come inseguitore di tensione.
Ciò fornisce una sorgente di tensione a bassa impedenza di uscita, consentendo alla tensione di offset CC di essere meno vulnerabile all'impatto del carico di IC1: B.
Quando il 'potenziometro' viene commutato, la tensione di offset CC inizia a variare, verso l'alto o verso il basso in base alla direzione in cui viene capovolto il potenziometro. Il diodo D3 presenta una protezione contro l'inversione di polarità per il controller.
Il resistore R15 e il condensatore C2 sono un semplice filtro passa basso. Questo ha lo scopo di pulire eventuali picchi di tensione causati dai MOSFET quando accendono l'alimentazione al motore.
Elenco delle parti

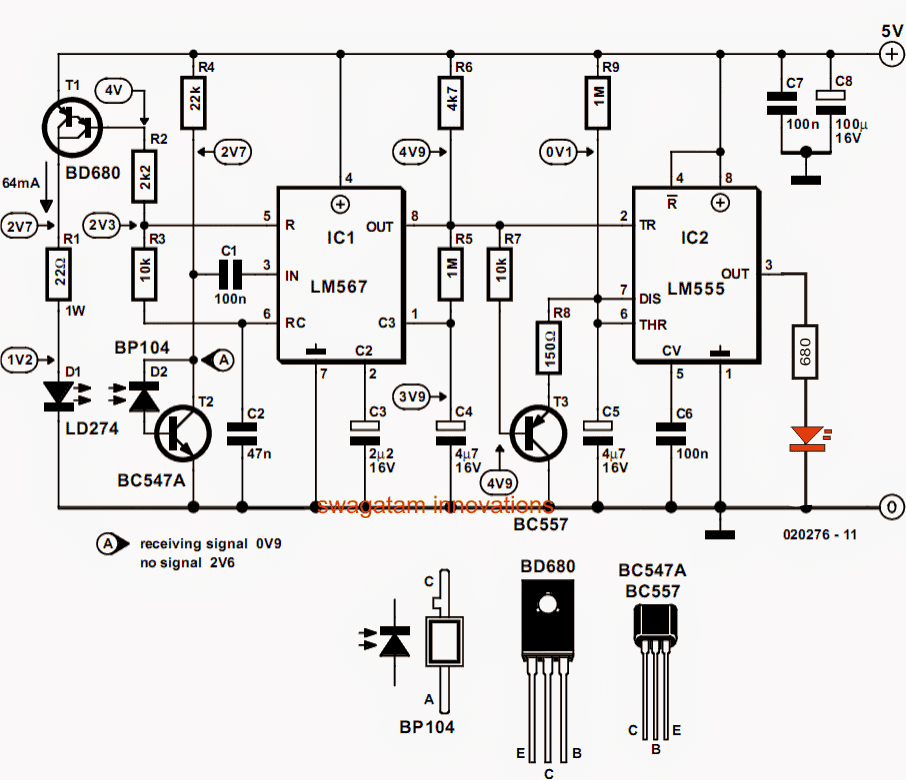
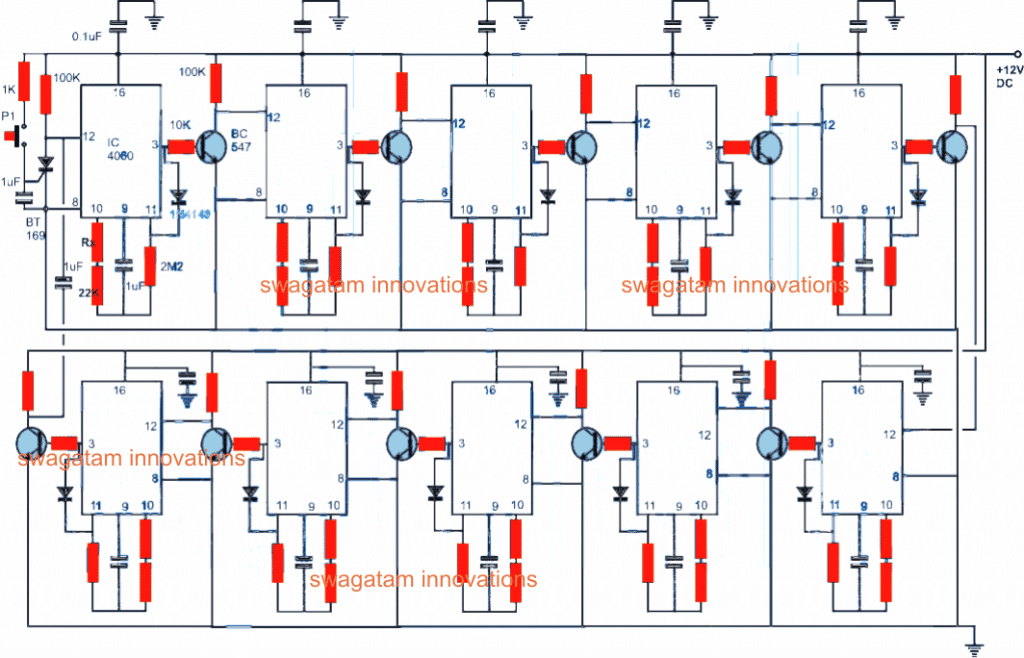
2) Controllo motore bidirezionale utilizzando IC 556
La velocità e il controllo bidirezionale per i motori CC è relativamente semplice da implementare. Per i motori ad eccitazione indipendente, la velocità è, in linea di principio, una funzione lineare della tensione di alimentazione. I motori con un magnete permanente sono una sottocategoria di motori ad eccitazione indipendente e sono spesso utilizzati in giocattoli e modelli.
In questo circuito, la tensione di alimentazione del motore viene variata mediante la modulazione di larghezza di impulso (PWM) che garantisce una buona efficienza nonché una coppia relativamente elevata a basse velocità del motore. Una singola tensione di controllo compresa tra 0 e +10 V consente di invertire la velocità del motore e di variare da zero a massima in entrambe le direzioni.
Il circuito integrato multivibratore astabile è impostato come un oscillatore a 80 Hz e determina la frequenza del segnale PWM. La fonte attuale T1 addebita Ca. La tensione a dente di sega attraverso questo condensatore viene confrontata con la tensione di controllo in 1C2, che invia il segnale PWM al buffer N1-Na o NPN1. Il driver del motore basato su Darlington è un circuito a ponte in grado di pilotare carichi fino a 4 Amp, a condizione che la corrente di rodaggio rimanga inferiore a 5 Amp e che sia fornito un raffreddamento sufficiente per i transistor di potenza T1 -T. I diodi D1, D5 offrono protezione contro le sovratensioni induttive del motore L'interruttore S1 consente di invertire istantaneamente la direzione del motore.

Immagini prototipo



Precedente: Capire i circuiti dell'amplificatore Avanti: Come collegare transistor (BJT) e MOSFET con Arduino